ARTIGO ORIGINAL
SILVA, Francisco Roberto Oliveira da [1], SANTOS, Priscila Soares dos [2], ROMEU, Mairton Cavalcante [3], CASTRO, Juscileide Braga de [4]
SILVA, Francisco Roberto Oliveira da. Et Al. O uso da placa Arduino no estudo de Movimento Circular: Uma proposta de intervenção para a Física no Ensino Médio. Revista Científica Multidisciplinar Núcleo do Conhecimento. Ano 06, Ed. 02, Vol. 06, pp. 46-55. Fevereiro de 2021. ISSN: 2448-0959, Link de acesso: https://www.nucleodoconhecimento.com.br/educacao/movimento-circular, DOI: 10.32749/nucleodoconhecimento.com.br/educacao/movimento-circular
RESUMO
Existem na literatura projetos com o uso da placa Arduino atribuídos ao ensino de Física para a abordagem de fenômenos físicos relacionados ao conteúdo de Cinemática. Por meio da aplicação e questionários ao final da atividade. Este artigo apresenta o uso da plataforma como proposta de ensino para a temática Movimento Circular Uniforme (MCU) para professores de Física de primeiro ano do Ensino Médio, com o intuito de ampliar a compreensão dos alunos de conhecimentos básicos como cinemática escalar e vetorial e como associá-los à situações do cotidiano. Essa pesquisa é voltada para professores de Física que ministram aulas em turmas de primeiro ano do Ensino Médio, com uma atividade prática em que os estudantes analisariam as características de MCU, percebidas na atividade em grupo e a utilização de um questionário e de situações-problemas para favorecer as tentativas dos alunos, discussões em grupo os pontos de vistas e suas conclusões.
Palavras-chave: Arduino, Ensino Médio, Ensino de Física.
1. INTRODUÇÃO
Existem na literatura publicações como a dos autores Trentin; Pérez e Teixeira (2013) com projetos relacionados ao uso da placa Arduino atribuídos ao ensino de Física nas escolas como a dissertação intitulada “Experimentos de baixo custo para o ensino de Física em nível Médio usando a placa Arduino UNO” do autor Fetzner Filho (2015) que aborda equipamentos projetados com essa plataforma e utilizados para explicar fenômenos físicos relacionados ao conteúdo de Cinemática. Por meio da aplicação e realização de provas e questionários ao final de cada atividade com os alunos, os resultados apresentaram que essa abordagem em conjunto com a metodologia escolhida de ensino contribuíram para motivar os alunos e em sua aprendizagem.
Segundo Silva (2005), atividades experimentais possibilitam uma maior interação entre professor e aluno e a oportunidade de construção de conhecimento através da investigação crítica e racional. Em seu trabalho apresenta práticas com montagem experimental, guia para os alunos e ações envolvendo tipos de sensores de LDR (Light Dependent Resistor), potenciômetros entre outros.
Mas o que é Arduino? E para que serve? Essa plataforma foi criada em 2005, na Itália e se tornou bem versátil ao passar dos anos, com utilizações em várias áreas, incluindo o ensino (PEREZ et al, 2013, p. 230) e além de proporcionar “o aprendizado de conceitos, tais como, os de Física, Matemática, Geografia, Programação entre outros, de forma simples e agradável”.
Arduino é uma plataforma de modelagem eletrônica de hardware aberto, de baixo custo, e que permite que professores, alunos ou qualquer pessoa possa criar projetos (FETZNER FILHO, 2015). Esse é o principal objetivo, criar ferramentas acessíveis, flexíveis e fáceis, especialmente para quem não tem condições de adquirir controles ou sensores sofisticados ou mais complicados (arduino.cc) [5] e com essa placa é possível à aquisição de dados e a medição de grandezas físicas.
Com a utilização desta ferramenta para o ensino de Física no Ensino Médio, este trabalho buscará apresentar uma proposta de metodologia para a temática de movimento circular no Ensino Médio, visando apresentar o uso da placa Arduino em experimentos educacionais para que os alunos possam ter uma maior compreensão e o professor ter mais recursos para as suas aulas.
Para apresentar uma sequência didática que envolva a Física e o uso de Arduíno para a compreensão de conhecimentos básicos de Movimento Circular e como associá-lo ao cotidiano do aluno, este trabalho desenvolveu-se com uma introdução sobre o Arduino e em seguida um referencial teórico sobre movimento circular, os procedimentos metodológicos e por fim, as considerações finais.
2. MOVIMENTO CIRCULAR UNIFORME (MCU)
O Movimento Circular Uniforme (MCU) em nosso cotidiano pode ser observado no movimento dos pneus de automóvel, no funcionamento de brinquedos giratórios de parques de diversões, no movimento de satélites ao redor do planeta terra, entre outros. A sua principal característica é que a partícula ou corpo em estudo tem o módulo da velocidade constante na sua trajetória circular.
Atualmente, quando MCU é apresentado em sala de aula são atribuídas algumas grandezas, como o período e a frequência, pois com elas é possível medir quantas voltas a terra faz em seu movimento de rotação (Quadro 1) e geralmente, quando um corpo realiza um MCU, ele tem a tendência de sair pela tangente ou manter uma trajetória em linha reta e este fato é explicado pela lei da inércia.
Quadro 1 – As definições das grandezas mais utilizadas no ensino de Movimento Circular.
3. METODOLOGIA
Com o intuito de apresentar o Arduino como ferramenta educacional para contextualizar elementos do conteúdo de Movimento Circular do ensino de Física com o cotidiano do aluno, essa pesquisa é classificada como pesquisa quase experimental pelo fato de apresentar uma proposta de intervenção de ensino através de uma sequência didática voltada para professores de Física que ministram aulas em turmas de primeiro ano do Ensino Médio e com a aplicação de um questionário como avaliação final.
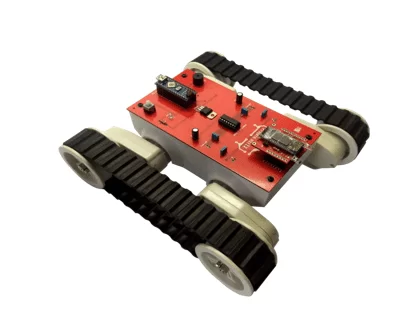
A primeira fase da metodologia é a confecção de um dispositivo eletrônico e para este trabalho é sugerido um chassi Rover 5 (Figura 1), cujas dimensões são de 24 x 22 cm com dois motores DC (Direct Current ou Corrente Contínua) de 3 a 9 volts.
No chassi é acoplada uma placa base que tem como componente principal um Arduino nano, que possui um microcontrolador que vai enviar as informações para o controle dos motores. Ressalta-se que este trabalho não foca na parte eletrônica da plataforma ou na programação do Arduino nano.
Figura 1: Chassi de esteira Rover 5 com o módulo Bluetooth
Para a abordagem de Movimento Circular utilizando conceitos da robótica é necessário focar em dois pontos: os motores e o controle destes através do PWM (Pulse Width Modulation ou modulação por largura de pulso).
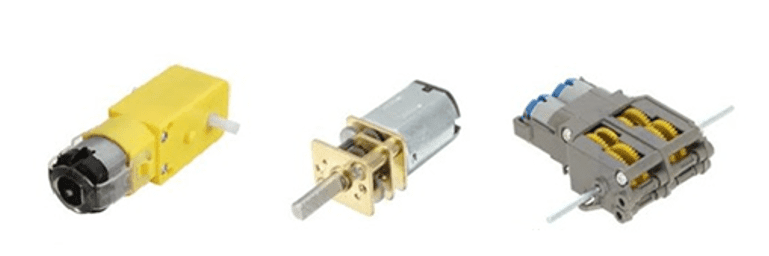
Os motores (Figura 2) que são usados na grande maioria de plataformas da robótica educacional, são motores DC de 6 a 9 volts. Em termos elétricos, um motor elétrico DC terá sua direção invertida ao se inverter a polaridade da alimentação que está submetida ao mesmo, ou seja, basta inverter a polaridade para a plataforma ir para frente ou para trás.
Figura 2: Modelo de motor da plataforma Rover 5.

Se a roda for encaixada diretamente no eixo do motor, este não terá força para movimentar a plataforma, logo é preciso aumentar essa força (torque) para que a plataforma tenha mobilidade, para isso é usada uma caixa de redução, para que sua velocidade seja diminuída e seu torque elevado. A Figura 3 apresenta alguns exemplos de caixas de redução utilizadas nesse processo.
Figura 3: Exemplos de caixas de redução.
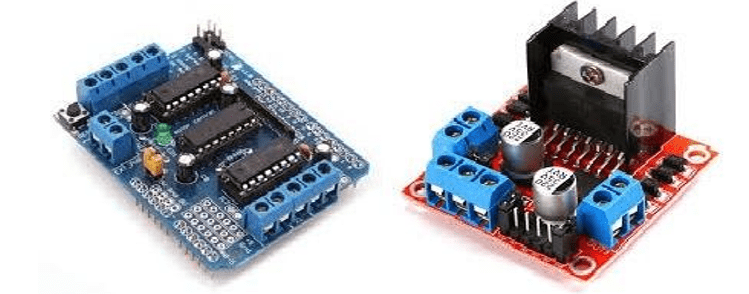
Para a plataforma realizar uma curva, os motores necessitam se movimentar em sentidos opostos (a plataforma gira em torno do seu próprio eixo). O circuito eletrônico que permite o controle dos motores é conhecido como ponte H, tal circuito permite controlar a velocidade e a direção dos motores. Os componentes mais comuns que formam a ponte H são os circuitos integrados L293D e o L298N (Figura 4).
Figura 4: Módulos que contém os circuitos integrados L293D e L298N.
A plataforma robótica pode ser controlada por um smartphone, através da tecnologia bluetooth e utilizando o aplicativo bluetooth rc car, onde é possível controlar a velocidade do dispositivo. A escolha do aplicativo se deu pela interface amigável que lembra um joystick e pela facilidade de configuração e de uso.
Figura 5: Aplicativo bluetooth rc car
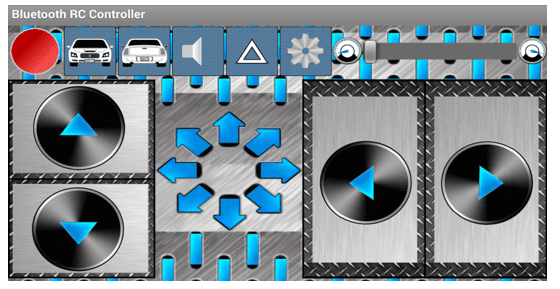
Os comandos que o smartphone envia para a plataforma robótica (frente, ré, esquerda e direita) são recebidos por um módulo bluetooth (figura 5) e codificados pelo Arduino nano e repassados para a ponte H fazendo com que a plataforma se movimente de acordo com o comando escolhido.
Figura 6 – Módulo Bluetooth conectado ao Arduino nano.

Com esse módulo de controle acoplado na plataforma robótica (Figura 6) e com o smartphone em mãos, em que controla a velocidade. Ressalta-se que o alcance obtido pela plataforma sendo comandada por este controle remoto é totalmente suficiente para o estudo em questão, pelo fato de que o experimento pode ser conduzido em um ambiente reduzido e assim é apresentado o recurso metodológico escolhido para esta pesquisa.
A segunda fase é a proposta de intervenção com a orientação de que seja aplicada em duas aulas. Na primeira, o foco seria no conhecimento teórico necessário como a introdução ao Movimento Circular e suas equações. Na segunda aula, seria iniciada com o experimento da placa Arduino pelo professor e as instruções para os alunos praticarem ao usar o equipamento a cada atividade feita e após isso, responder o questionário a partir da realização da prática.
A proposta é que no primeiro momento com o robô, o aluno analise as suas características e tenha as primeiras noções de movimento circular, focando principalmente nos motores e nas rodas. Após isso, seguiria com uma atividade similar à primeira atividade de Clementino Neto (2019), em que seriam colocadas faixas de fita isolante na superfície de uma mesa ou no chão mesmo (o local escolhido não faz diferença) para marcar o tempo percorrido e os alunos analisariam a variação nas grandezas físicas no trajeto percorrido pelo robô.
E ao final dessa prática, os alunos responderiam a um questionário com perguntas abertas (Quadro 2) que não exigem respostas formais, proporcionando uma liberdade de respostas dos alunos.
Quadro 2. Modelo de perguntas para serem respondidas ao final da atividade.
| Quais as grandezas vetoriais envolvidas em um movimento curvilíneo do objeto em estudo? | Qual a trajetória do objeto em estudo? | Qual a diferença entre velocidade escalar e velocidade angular? | Qual o papel do Raio (R) da trajetória? |
Fonte: os autores.
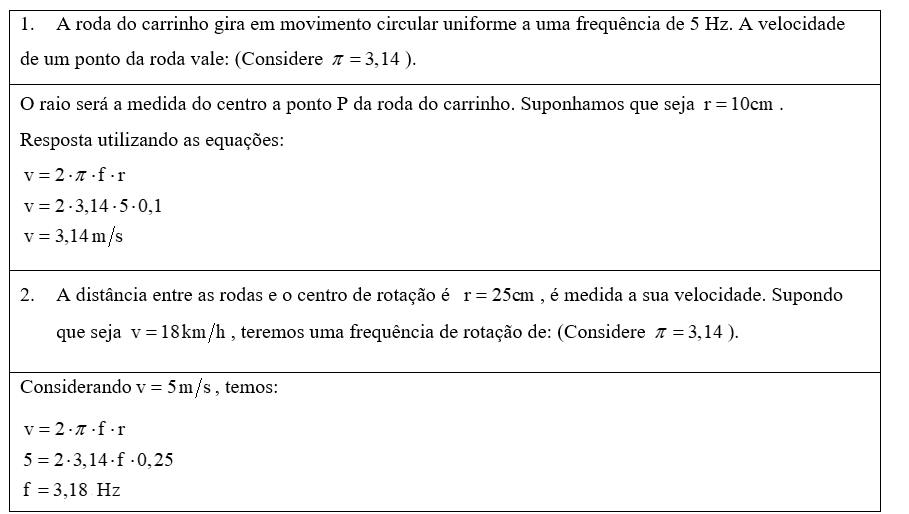
Serão propostas situações-problemas para resolver com a prática (Quadro 3), Almouloud (2017) descreve que “essas situações-problema devem auxiliar o aluno na construção de conhecimentos e saberes, e no desenvolvimento de habilidades” (p. 113). Dessa forma, contribuirá para a compreensão dos alunos, requerendo assim deles mais o uso dos conceitos físicos do que matemáticos, envolvendo as unidades e grandezas e é esperado que através de atividades desse tipo com o uso da robótica que quando os alunos utilizarem os conceitos físicos, eles consigam um bom desempenho, tanto com ou sem a interferência do professor.
Quadro 3. Modelo de situações-problemas para resolver com a prática.
CONSIDERAÇÕES FINAIS
O objetivo com essa proposta de prática em sala de aula ou em laboratório é analisar e entender as relações das grandezas características de um MCU com o uso da placa Arduino e que ao final, o aluno seja capaz de entender o caráter vetorial da velocidade e dos movimentos circulares, descrever movimentos circulares uniformes e variáveis com o uso das equações da cinemática angular e identificar os fenômenos do cotidiano relacionados aos movimentos circular uniforme e uniformemente variado.
Por meio de uma metodologia em que o professor utilize situações-problemas que favoreça a elaboração de ideias e as tentativas dos alunos com questões com respostas que podem ser comparadas com a realização das práticas, discutir em grupo e analisar pontos de vistas de cada um e suas conclusões. Acredita-se que essa pesquisa seja capaz de contribuir com professores na implementação de tecnologias em sala de aula e que favoreça a aprendizagem de conhecimentos físicos, provocando no aluno um maior engajamento nas atividades.
REFERÊNCIAS
ALMOULOUD, Saddo Ag. Modelo de ensino/aprendizagem baseado em situações-problema: aspectos teóricos e metodológicos. Revista Eletrônica de Educação Matemática, Florianópolis, v. 11, n. 2, p. 109-141, mar. 2017. ISSN 1981-1322. Disponível em: <https://periodicos.ufsc.br/index.php/revemat/article/view/1981-1322.2016v11n2p109/33631>. Acesso em: 02 out. 2020.
ARDUINO. Site Oficial disponível em: <https://www.arduino.cc>. Acesso em: 10 jul. 2020.
AUTOCORE ROBÓTICA. Site oficial disponível em: <autocorerobotica.com.br>. Acesso em: 13 ago. 2020.
CLEMENTINO NETO, L. (2019). Ensino de movimento circular através de roteiro de experimentos utilizando robótica educacional. Dissertação – Universidade Federal do Rio Grande do Norte, Escola de Ciências e Tecnologia, Programa de Pós-graduação em Ensino de Física. Natal, RN, 2019. Disponível em: <https://repositorio.ufrn.br/jspui/handle/123456789/28061>. Acesso em: 20/04/2020.
FILHO, G. F. (2015). Experimentos de baixo custo para o ensino de Física em Nível Médio usando a placa Arduino-UNO. Dissertação – Instituto De Física Da Universidade Federal Do Rio Grande Do Sul, Programa De Pós-Graduação Em Ensino De Física. Porto Alegre, RGS, 2015. Disponível em: <http://lief.if.ufrgs.br/pub/cref/rd/n01_Fetzner/Disserta%C3%A7%C3%A3o_Gilberto_Fetzner.pdf>. Acesso em: 27/03/2020.
PEREZ, Anderson L. F.; DARÓS, Renan R.; PUNTEL, Fernando E; VARGAS, Sandra R. Uso da Plataforma Arduino para o Ensino e o Aprendizado de Robótica. In: International Conference on Interactive Computer aided Blended Learning (ICBL), 2013, p.230 – 232. Disponível em: <http://www.icblconference.org/proceedings/2013/papers/Contribution77_a.pdf>. Acesso em: 20 ago. 2020.
SILVA, F. R. O. D. Aprendizagem de conceitos físicos de ondulatória com o auxílio de uma plataforma robótica. Dissertação – Instituto Federal de Educação, Ciência e Tecnologia do Ceará, Programa de Pós-graduação em Ensino de Ciências e Matemática. Fortaleza, CE, 2017. Disponível em: <http://pgecm.fortaleza.ifce.edu.br/wpcontent/uploads/2017/11/Disserta%C3%A7%C3%A3o_Roberto_Vers%C3%A3o_Final_15.08.2017.pdf>. Acesso em: 17/04/2020.
SILVA, L. F. Uma experiência didática de inserção do microcomputador como instrumento de medida no laboratório de Física do ensino médio. Dissertação – Instituto de Física, Universidade Federal do Rio Grande do Sul, Mestrado Profissional em Ensino de Física. Porto Alegre, RGS, 2005. Disponível em: <http://www.educadores.diaadia.pr.gov.br/arquivos/File/2010/artigos_teses/fisica/dissertacoes/uma_experiencia.pdf>. Acesso em: 25/04/2020.
TRENTIN, Marco A. S.; PÉREZ, Carlos Ariel Samudio; TEIXEIRA, Adriano Canabarro. A robótica livre no auxílio da aprendizagem do movimento retilíneo. Anais do Workshop de Informática na Escola, [S.l.], p. 51, nov. 2013. ISSN 2316-6541. Disponível em: <https://br-ie.org/pub/index.php/wie/article/view/2612/2267>. Acesso em: 14 ago. 2020.
APÊNDICE – REFERÊNCIA DE NOTA DE RODAPÉ
5. www.arduino.cc
[1] Mestrado em Ensino de Ciências e Matemática.
[2] Mestrado em andamento em Ensino de Ciências e Matemática.
[3] Doutorado em andamento em Departamento de Física.
[4] Doutorado em Educação.
Enviado: Dezembro, 2020.
Aprovado: Fevereiro, 2021.

