ARTIGO ORIGINAL
SANTANA, Iuri Lopes [1], JÚNIOR, Dionísio Costa Cruz [2]
SANTANA, Iuri Lopes. JÚNIOR, Dionísio Costa Cruz. Benefícios da aplicação de drones em perícias de colisões de veículos automotores. Revista Científica Multidisciplinar Núcleo do Conhecimento. Ano 04, Ed. 06, Vol. 10, pp. 122-141. Junho de 2019. ISSN: 2448-0959
RESUMO
Os veículos aéreos não tripulados vem sendo desenvolvidos modernamente e são tecnologias disponíveis para os mais variados graus de aplicação. Os benefícios mais relatados são as eficiências técnicas, a eficiência econômica, a cobertura de área, os itens capturados e o tempo geral de operação que depende do caso de estudo e aplicação. Com isso, este trabalho teve como objetivo motivar a aplicação dos veículos aéreos não tripulados na perícia de acidentes de trânsito, fundamentando-se em referenciais literários sobre aplicações em casos de perícia de acidentes de trânsito, suas análises de abordagens, suas aplicações de modelagem, sua literatura de métodos clássicos de perícia de acidentes e no exercício simulado de modelagem 3D como produto de aplicação simples. As imagens coletadas pelo veículo aéreo não tripulado para a modelagem do presente trabalho foram processadas no programa AGISOFT. Por fim, destaca-se que os veículos aéreos não tripulados podem ser aplicados na área de perícia de acidente de trânsito.
Palavras-chave: veículo aéreos não tripulados, perícia de acidentes de trânsito, modelagem 3D.
1. INTRODUÇÃO
Investigar o comportamento dinâmico de uma região faz pensar sobre as evoluções sistemáticas nos processos de análises pertinentes a variados campos de matérias e ciências. Quando se refere a uma região específica de acidente, seja ambiental, automobilístico, criminal, entre outros, geralmente a perícia demanda tomadas de decisões específicas para que não se alterem as condições dos vestígios, assim preservando as alterações no espaço físico que serão observadas para a determinação da causa, efeito e resultado do fato ocorrido.
Diante disso, observando a visão sistêmica que é um conceito de “abordagem do todo”, ou seja, da análise multicenário de processos como causas e consequências, são obtidas vantagens através das relações analíticas de estudos que ajudam e contribuem nas tomadas de decisões dos peritos.
Corroborando com essa visão sistêmica, Ma, Zheng e Lallie (2010) mostraram que a animação tridimensional gerada por um computador pode ser um ótimo compilador de apresentação de cenas de crimes ou acidentes e a visão computacional incrementa como potencial de aplicação nesse sentido. De fato, essa aplicação remete a análise mais aprofundada no que tange aos usufrutos desses produtos diante de análises de investigações policiais ou jurídicas no processo penal respectivo. Os benefícios são fatos relevantes tanto economicamente na execução de ações quanto no tempo de análise da abordagem do acidente ou demais aplicações em estudos.
Analisando esses benefícios de uma forma integrada com o uso dos drones ou geotecnologias são possíveis várias interpretações principalmente quando se busca otimizar a compatibilização da atuação conjunta de equipes de perícia e agentes que perfazem a atuação em campo, com as diretrizes legais para assegurar o isolamento da área, a coleta, a avaliação, a identificação, o ajuste de mobilidade no trânsito para os demais transeuntes das vias interditadas, além de outros benefícios.
Sabe-se que os drones são ótimas ferramentas para capturar alvos determinados, e o produto oriundo processado com as geotecnologias se associam como benesses para diversas aplicações.
O trabalho propõe evidenciar a importância do uso dos drones nas perícias de acidentes de trânsito. Está estruturado em três seções. Inicialmente é apresentado o contexto literário, em seguida produzido uma simulação em 3D como exercício de fundamento e finalizado com a construção da Tela Estratégica detalhando mais observações.
1.1 REVISÃO DA LITERATURA
É importante conhecer alguns termos definidos pelo DECEA – Departamento de Controle do Espaço Aéreo (2019):
a) Drones: Contextualização mais genérica (definição nos Estados Unidos). Está relativamente imposto a todo e qualquer objeto voador não tripulado. Foi destacado que aqui no Brasil tal definição não se fundamenta na generalidade, mas sim na necessidade de interpretação legalmente definida com base em uma legislação de aplicação.
b) Aeronave autônoma: Foi definida como aquelas remotamente pilotadas, automáticas ou autônomas. As remotamente pilotadas apresentam a interferência do piloto nas ações de voo. As automáticas por mais que ainda possam ter a interferência do piloto seguem padrões estabelecidos para um comportamento determinado ou planejado. Já as autônomas não possuem interferência no pós voo do piloto de forma que não são autorizadas no espaço aéreo brasileiro.
c) Aeromodelo: O aeromodelo é reconhecido como uma aeronave remotamente pilotada e segue as definições presentes na Lei 7.565 (Código Brasileiro de Aeronáutica).
d) RPA: Remotely Piloted Aircraft ou Aeronave Remotamente Pilotada é uma aeronave não tripulada, o piloto não está a bordo, mas controla sua aeronave remotamente por uma interface externa. A chamada RPA é a perfeita terminologia para os fins de caráter não-recreativo.
e) RPAS: sistemas de RPA, envolvendo todo o conjunto das RPA, recursos, enlaces e comandos.
A ABD – Associação Brasileira Drones (2017) destacou efetivamente características associadas ao uso de drones na segurança pública. Os principais pontos couberam à eficiência técnica, econômica e segurança no seu uso frente a escolha de helicópteros que resguardam outras características mais onerosas e de logística mais planejadas. Além disso, destacou que em acidentes de trânsito seria útil o uso de drones para o registro de cenas, o que facilitaria a produção dos relatórios.
Quando se fala em aplicação de drones na perícia de acidentes de trânsito o tema ainda é pouco difundido no Brasil, e de fato não existe aplicação explorada com uso de drones nesta área tão específica e que demanda muita atenção das autoridades competentes, visto que os acidentes no trânsito são elevados estatisticamente nas rodovias, juntamente com os sinistros de diferentes gravidades nos centros urbanos ou regiões periféricas. Os tipos de acidentes e distribuição ao longo do país, de acordo com os dados de acidentes extraídos do site da Polícia Rodoviária Federal (2019), no ano de 2018 as regiões nordeste, sudeste e sul apresentaram as maiores concentrações de acidentes de trânsito e isso evidencia ainda mais como o uso de Drones pode auxiliar muito nas aplicações pelas entidades responsáveis de investigação e perícia em sinistros.
Aguiar (2016) desenvolveu um trabalho em que buscava descobrir como as causas dos acidentes de viação elaborados por uma reconstituição científica contribuiriam para a adoção de medidas de prevenção rodoviária. Sua conclusão a respeito do uso de drones e lasers foram os destaques de serem instrumentos incrementadores juntamente com o tratamento da informação recolhida, proporcionando aos investigadores ou peritos uma maior aproximação para a realidade nos resultados finais da reconstituição dos acidentes.
De fato, essa análise é importante na modelagem da prevenção de novos acontecimentos diante do diagnóstico realizado, visto que na maioria das vezes são atribuídos como causas apenas a culpa caracterizada no fato típico do crime, impossibilitando muitas vezes que os estudos aprofundados auxiliem a gestão das autoridades competentes e no emprego de tecnologias na coleta de provas, falhas, abordagens criteriosas de projeto e na busca de melhores adaptações tecnológicas nos trechos de estradas, rodovias e vias urbanas em geral. Dessa forma, um estudo aprofundado caracteriza a garantia do conforto, a preservação da ordem pública e a segurança dos cidadãos se devidamente aplicados com as tecnologias adequadas para recolher informações e se produzido um relatório confiável para auxiliar as decisões das autoridades competentes.
Su et al. (2016) estudaram como desenvolver um sistema de mapeamento baseado em veículos aéreos não tripulados para obter rapidamente diagramas de cena. Esse estudo foi interessante devido ao fato dos autores aplicarem técnicas de refinamento para garantir maior qualidade no produto final de recolha de informações. Entre essas técnicas foram observadas a calibração da câmera, a eliminação da distorção perspectiva, o método de mapeamento de cenas a partir de imagens retificadas e os modelos de desempenho para estimação de erros. Diante das observações dos autores foi constatado que o erro médio quadrático total (RMSE) da imagem retificada foi de 3,6 pixels, e o erro relativo de medição na imagem retificada podia ser controlado para -2,5% a ~ 2,5% quando o VANT estava entre 11 a 112 m de altitude de voo. Percebe-se com esses detalhes de resultado que os drones podem ser utilizados na captura de informações com qualidade e eficiência. Reafirmando isso, os autores evidenciaram que este método proposto para desenhar diagramas de cena é mais rápido e fácil do que o desenho à mão e que é indicado esse sistema para fornecer um método viável para obter um diagrama de cena de um acidente de trânsito.
A PIX4D (2014) junto com a Polícia do Canadá utilizou drones para documentar colisões e cenas de crimes usando modelos UAV (Unmanned Aerial Vehicle ou Veículo Aéreo Não Tripulado) adquirindo imagens de uma cena de acidente de carro encenado em baixa altitude. As imagens processadas no Pix4Dmapper para reconstruir a cena tridimensional apresentou um mapeamento de UAV com resultados correspondendo a exatamente ou dentro da precisão de um centímetro quando comparados aos métodos tradicionais (medições de fita e scanner a laser). Ainda assim, o comportamento do uso de drones nesse estudo designou um passo importante para se verificar alguns procedimentos relativos ao curto planejamento de tempo de voo, a opcional utilização de pontos de controle de GPS nos cantos dos automóveis para melhorar a precisão global dos resultados finais e a técnica de voo oblíquo para captura de diferentes ângulos com ênfase em melhorar os detalhes da colisão.
Necessariamente o fluxo de trabalho elaborado pela PIX4D (2014) nesse experimento encandeou que os UAV fornecem soluções mais práticas, pois respondem mais rapidamente aos casos de emergência. São utilizados também em monitoramento de desastres naturais e para cenas de acidentes de cobertura ampla, os UAV economizam horas ou até dias no tempo gasto na coleta de dados e medições.
Zulkipli e Tahar (2018) elaboraram um mapeamento fotogramétrico utilizando um UAV multirrotor para um projeto de estradas. Os autores aplicaram diversas singularidades específicas como calibração do equipamento e medição de dados, coleta de dados usando imagens de UAV, processamento dos dados usando o software Agisoft PhotoScan. O UAV utilizado neste estudo foi o Quad-Rotors, Phantom 3 Professional e os resultados apresentados por este foi satisfatório para a pesquisa, pois foi demonstrado que o UAV junto com a câmera digital era capaz de adquirir fotografia aérea para mapeamento em larga escala em um curto espaço de tempo e que o UAV também era capaz de produzir mapeamento de estradas na área de estudo selecionada.
Muitos outros autores e pesquisadores continuam desenvolvendo estudos e pesquisas na área de tecnologias com os drones atualmente, devido a expectativa em relação às potencialidades desses instrumentos. Elloumi et al. (2018), por exemplo, utilizaram para o monitoramento do tráfego rodoviário um sistema baseado em UAV como uma solução atrativa de monitorização do tráfego rodoviário, devido à mobilidade, baixo custo e amplo alcance de visão. Como resultado, desenvolveram um sistema que tinha a vantagem em relação ao desempenho do sistema de monitoramento do tráfego da trajetória do UAV fixo em termos de taxas de cobertura e taxas de detecção de eventos.
Referente a atuação na perícia de acidentes de trânsito, as interpretações em ambientes computacionais dos dados colhidos dos drones são importantes para o processamento e obtenção dos resultados necessários pelos peritos ou investigadores analistas. Oliveira et al. (2013) realizaram um trabalho objetivando a reconstrução de acidentes de trânsito envolvendo veículos, por meio de visualizações interativas 3D e simulações de dinâmica em forense. Hussin et al. (2004 apud Oliveira et al. 2013) explicaram que a visualização interativa 3D que produz animações computacionais e a visualização interativa 3D que produzi animações forenses, são diferentes. Para Hellingman (1992 apud Oliveira et al. 2013), nas animações forenses ao reconstruir um fato ocorrido, todos os objetos do ambiente respeitarão os princípios fundamentais da Física. Neste contexto, as presenças de evidências são primordiais para uma reconstrução de cena de colisão entre veículos, por assim verificar tamanha importância da garantia da inalteração pós-fato para que se obtenha um produto final de qualidade onde os analistas podem especificar todos os detalhes a serem extraídos. Logo percebe-se que na perícia com o uso de drones é necessário, por interpretação extensiva, garantir o isolamento da área de forma planejada, mas com as diferenças cabíveis aos métodos tradicionais.
No que tange aos métodos tradicionais aqui no Brasil, de acordo com a Polícia Rodoviária Federal (2015) em seu manual de atendimento de acidentes de trânsito, pode-se destacar as primeiras ações de padronização da atuação do agente policial e da revisão da ocorrência além de outros procedimentos necessários para garantir a segurança dos demais envolvidos, a garantia de resgate das vítimas e a garantia da proteção do local para os peritos executarem suas atividades. Entre algumas delas se destacam:
a) Dimensionar a cena (avaliar a amplitude do acidente, verificar os riscos existentes e as condições de segurança do local);
b) Providenciar a sinalização do local;
c) Estabilizar o(s) veículo(s), verificar o estado da(s) vítima(s), se houver, prestando o devido socorro;
d) Nos casos de acidentes com mortos ou feridos graves, isolar o local visando à preservação dos vestígios em atendimento ao prescrito na legislação vigente. E nos casos de acidentes com veículos oficiais ou com derramamento/vazamento de produtos perigosos (observar a necessidade de perícia) isolando com o uso de fitas zebradas delimitando o espaço a ser isolado.
Importante essa atuação preliminar dos agentes pois a perícia que atua com os drones necessita também do apoio inicial de solo, da sinalização do sítio do acidente, do levantamento do sítio do acidente (observações para obtenção dos dados necessários ao registro do boletim de acidente e/ou do laudo pericial), do croqui (desenho esquemático representativo do sítio onde ocorreu o acidente, sendo obrigatório para todos os sinistros e para os que tiverem os veículos retirados da posição final), da amarração (procedimento realizado pelo policial para a obtenção das distâncias dos elementos do sítio do acidente em relação a um referencial ponto fixo) e da elaboração da narrativa.
Todos esses fatos agregados e as condições ambientais são somados na atuação de um perito de acidentes de trânsito que emprega o uso de drones. Pasqualini (2016) em seu estudo destacou que o retrato esquemático de uma cena de crime é uma das etapas mais importantes do exame pericial e do laudo a ser produzido, reforçando a necessidade para a sua correta interpretação da prova material. O autor também destacou que incluir no laudo pericial fotografias panorâmicas ou filmagens, auxilia parte do trabalho pericial e que o uso designado de um drone para essa especificidade pode ter um resultado diferente caso aplicado em outras áreas.
Pasqualini (2013), em uma publicação no XXII Congresso Nacional de Criminalística de Brasília, apresentou dentre os principais tipos de VANTs existentes na época o que melhor se adequaria ao trabalho dos peritos criminais na realização de exames de locais de crime, o multirrotor, e, em 2016, em revisão, reafirmou a mesma indicação. Na sua defesa de escolha foram analisados os seguintes parâmetros:
a) Payload (carga útil é o peso que um drone ou um veículo aéreo não tripulado (UAV) pode carregar. A capacidade de elevação é fundamental);
b) Manobrabilidade;
c) VTOL (decolagem e aterragem vertical);
d) Autonomia de voo;
e) Logística;
f) Operação;
g) Características Construtivas;
h) Custo de Aquisição e
i) Combustível.
O que se observou é que essas avaliações são importantes diante do fato e tipo de perícia. Quanto a perícia criminal de investigação de acidentes de trânsito corroborada na hipótese do uso de um multirrotor se fundamentaria, pela literatura, em uma área especificamente tolerada para esse tipo de estudo em comparação com a área de uso dos aviões ou helicópteros se adequariam para outros estudos mais abrangentes.
Gomes (2010) em seu estudo apresentou conceitos relativos à investigação com métodos clássicos. Dentro das suas abordagens pode-se destacar a fase de investigação com as fases de recolha de dados, análise e apresentação dos fatos. Na fase de recolha dos dados para a reconstituição dos acidentes, IDMEC/IST (2007 apud GOMES, 2010) destaca duas etapas fundamentais:
a) A informação recolhida no local do acidente;
b) Modelagem computacional do acidente.
Para o autor algumas observações devem ficar claras no momento da recolha dos dados, como as posições dos veículos e das pessoas envolvidas no acidente, as marcas na estrada (pneus ou outras marcas de embate), estragos dos veículos e/ou danos corporais. Isso reforça o fato de a investigação no solo demandar muito mais precaução para garantia de melhor qualidade de dados. Para calcular as distâncias ao ponto de referência desejado, a perícia tradicional utiliza os métodos de triangulação ou de coordenadas. O ponto negativo do primeiro método é a dificuldade de medir grandes distâncias em linha reta. Já o método da triangulação estabelece pontos de referência formando triângulos nas suas distâncias. A seguir são ilustrados os dois métodos nas figuras.
Figura 3.2- Método das coordenadas.

Figura 3.3- Método da Triangulação.
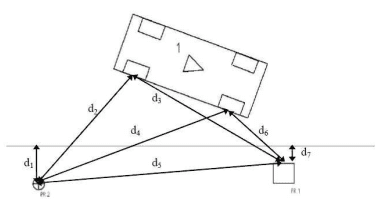
Algumas observações nos acidentes em que as marcas dos pneus no asfalto são curvilíneas demandam o emprego de outros instrumentos, como a roda de medição, além da preocupação, de acordo com o autor, em caso de água no qual a hidroplanagem remove tais marcas, indicando a necessidade da brevidade da perícia. A Fotogrametria, comentada no seu trabalho, é uma técnica de imagem baseada na aplicação das leis da geometria que auxiliam na recolha de informações (fotografias), transformando-se em registros permanentes, e através delas são diagnosticadas informações importantes sobre deformações dos veículos e das marcas deixadas pelo acidente.
De acordo com Traffic Accident Study Guide (2003 apud GOMES, 2010), a fotogrametria não substitui os croquis ou outros modelos de investigação. Procedimentos como fotografar em imagem única que mostre a posição final dos veículos e as marcas de derrapagem, o início das marcas de pneus e todas as marcas na estrada que definem o percurso do veículo e a presença de resíduos líquidos na via, destroços e as condições meteorológicas, são de grande importância.
O que se percebe é que as posições das fotografias ao redor dos veículos envolvidos no acidente são importantes para melhor auxiliar os estudos posteriores.
2. MATERIAIS E MÉTODOS
Para a simulação do acidente, dois automóveis foram colocados em um local determinado em posições que indicassem a ocorrência de um sinistro, onde o impacto lateral indicava o desvio da trajetória do veículo. Seguindo o processo, com o uso do drone, foram capturadas imagens e no escritório executou-se o processamento no software adequado para a obtenção dos produtos finais característicos de criação da modelagem 3D, como segue o fluxograma a seguir:
![]()
2.1 AERONAVE REMOTAMENTE PILOTADA
Foi utilizado na operação de voo, um UAV da DJI Phantom 4 Pro com câmera sensor CMOS RGB 20 MP. Na missão foi resguardado respeitar o tempo padrão de 30 minutos limite. A figura 4.4 ilustra o drone utilizado.
Figura 4.4 – Phantom 4 Pro

2.2 PLANEJAMENTO DE VOO E COLETA DE IMAGENS
No Planejamento do voo foi definida a altitude superior a 100 m para a execução da missão. A situação do vento era favorável com velocidade menor que 10 m/s onde o UAV selecionado desempenhou toda a trajetória com tranquilidade. O overlap e o slidelap foram configurados em 60% respectivamente.
O tempo total de preparação antes do voo foi aproximadamente 10 minutos. Uma vez definido o plano de voo, levou menos de 30 minutos para completar a missão planejada. As coletas das imagens se basearam em um terreno aberto com diversificação de vegetação rasteira e terreno rugoso. Dois automóveis foram posicionados para representar uma colisão em um pequeno trecho de curva de uma estrada acentuada. Grosseiramente, não foi realizado voo 360 graus em torno dos automóveis parados justamente por tratar-se de uma simulação simples, para evidenciar os limites mínimos de usufruto de um produto gerado com emprego do UAV.
2.3 PROCESSAMENTO DAS IMAGENS
As imagens capturadas foram previamente analisadas por inspeção visual. Em seguida, as imagens foram separadas e anexadas no software Agisoft PhotoScan Professional Edition, versão 1.2.5.
Como melhoria da precisão dos dados, foi utilizado um GNSS RTK e ofertados pontos de apoio, no qual foram importados para o software e usados como pontos de controle de solo e pontos de verificação caracterizando uma fase de conversão das coordenadas geográficas. Os demais processos foram trabalhados de acordo com o fluxograma correspondente de trabalho.
2.4 RESULTADO PRELIMINAR DA SIMULAÇÃO
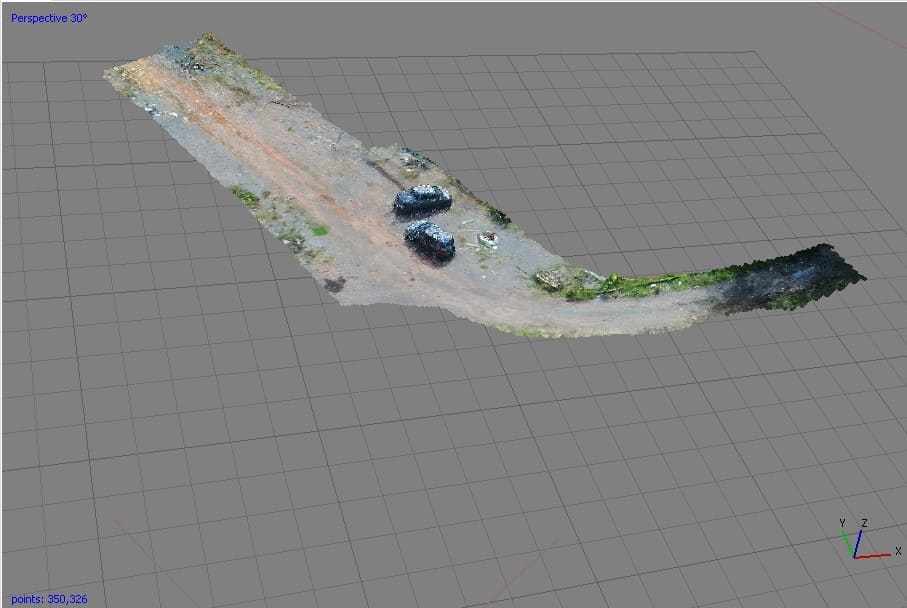
A nuvem de pontos criada mostrou um resultado simples, mas com boa identificação dos objetos e dos veículos como segue a figura 4.5.
Figura 4.5 – Nuvem densa de pontos
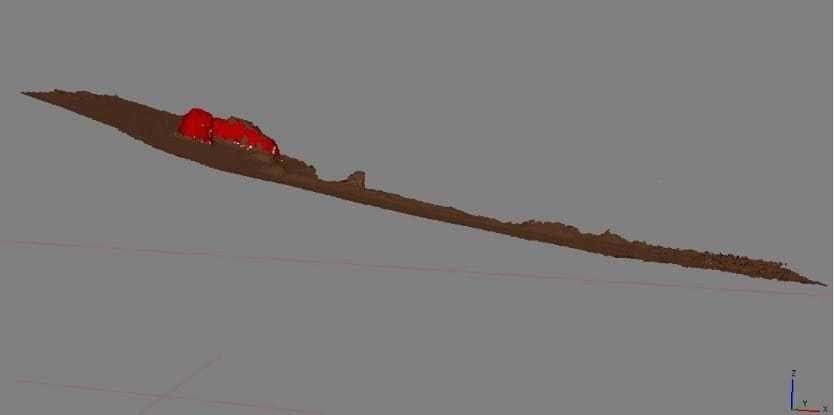
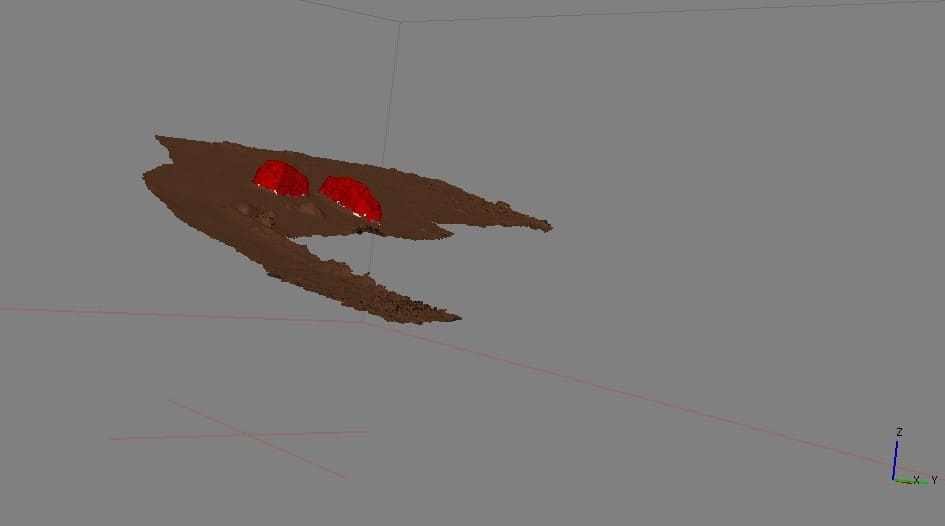
Foram produzidas grades de pontos destacando as diferenças entre os perfis solo e os automóveis para representação modelada, o que ajudou a identificar com melhor qualidade de classificação os objetos encontrados no local do sinistro, desde a classificação do solo, construções e outros objetos. Está representado na figura 4.6 o resultado desse procedimento.
Figura 4.6 – Classificação das grades de pontos
O modelo digital de elevação permitiu avaliar as altitudes características dos objetos e uma visualização graduada do local do sinistro, permitindo a identificação em relação ao nível do mar e a relação geográfica dessa altitude, figura 4.7.
Figura 4.7 – Modelo Digital de Elevação
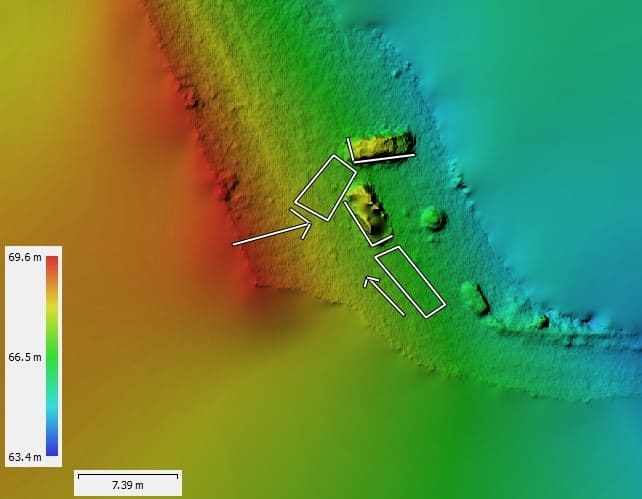
O perfil topográfico foi criado para analisar o traçado característico do local do acidente. No caso simulado, possibilitou ao hipotético perito analisar o relevo como acentuado e configurado como uma descida prolongando-se com uma curva à esquerda. A análise pericial poderia utilizar essa ferramenta para avaliar principalmente se um dos carros estaria com velocidade incompatível com o traçado, associando as marcas identificadas no terreno e outros fatores como condição física e biológica do condutor reforçando uma explicação cabível para o sinistro. A figura 4.8 demonstra a elevação variando entre 67,4 a 65 metros na situação descrita do sinistro simulado próximo à curva.
Figura 4.8 – Perfil Topográfico do local do sinistro
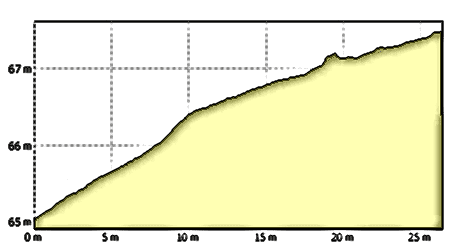

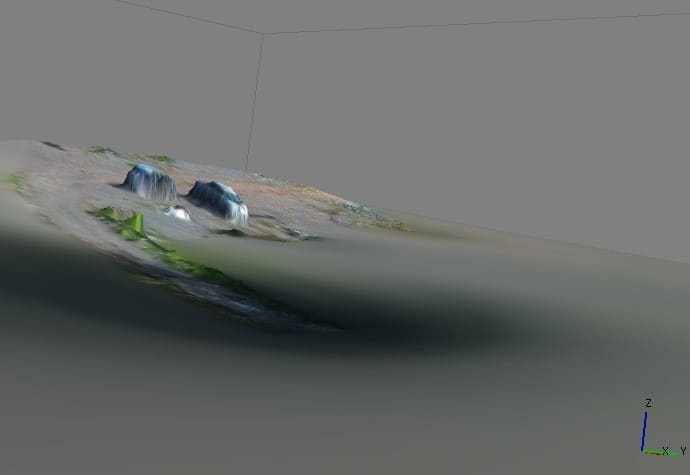
O produto final em 3D, texturizado e em Tiled model, representa essa acentuação e apresentação final de trabalho, figura 4.9.
Figura 4.9 – Modelo 3D – Texturizado, Tiled Model
2.5 TELA ESTRATÉGICA DE AVALIAÇÃO GERAL
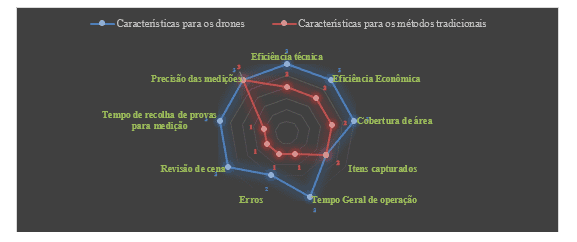
Analisando a revisão de literatura desse trabalho, analisando a produção e resultado da simulação de modelagem de recriação da cena de acidente de trânsito foram selecionados os seguintes parâmetros para a apresentação e desenvolvimento de uma Tela Estratégica de confrontamento entre o uso de drones em perícia de acidentes de trânsito e os métodos tradicionais, pontuados com pesos na escala de 1 – ruim, 2 – médio e 3 – bom.
Quadro 4.1- Parâmetros de comparação entre métodos com uso de drones e tradicionais.
| Parâmetros | Fundamentação da escolha da nota peso pela revisão literária | Características para os drones | Características para os métodos tradicionais |
|---|---|---|---|
| Eficiência técnica | ABD (2017);
Traffic Accident Study Guide (2003 apud Gomes, 2010); Gomes (2010) |
Positivas, as técnicas de voo se sobressaem por preservarem qualidades e possibilitarem aplicação de novas ferramentas. Nota peso de variação 3. | Positivas e negativas, na perícia de campo ainda existe a interferência em solo do homem. Nota peso de variação 2. |
| Eficiência Econômica | ABD (2017)
Pasqualini (2017) |
Positivas, envolvem a logística, energia ou combustível, autonomia de voo e custo de aquisição. Nota peso de variação 3. | Positivas, investimento padrão de custo com equipamentos que garantem a tomada de atuação dos peritos em campo, mas os resultados podem não ser tão eficientes associado a erros manuais de aplicação. Nota peso de variação 2. |
| Cobertura de área | ABD (2017)
Pasqualini (2016) Gomes (2010) |
Positivas, especificamente para a perícia de acidentes de trânsito são bem recomendadas. Nota peso de variação 3. | Negativas e positivas, devido à complexidade em solo do isolamento e não alteração dos vestígios ou marcas, demandam planejamento mais preciso para o isolamento da área de interesse do acidente e aplicação das técnicas tradicionais. Nota peso de variação 2. |
| Itens capturados | Su et al. (2016) | Positivas, boas capturas gerais das marcas pertinentes do acidente, mas ainda deficiente em capturar marcas menos expressantes. Nota peso de variação 2. | Positivas, diferenciado na captura de medições de marcas menos expresantes. Nota peso de variação 2. |
| Tempo Geral de operação | Su et al. (2016)
Pasqualini (2016) |
Positivas, tempo agregado geral (preparação, gravação, processo de mapeamento) menor. Nota peso de variação 3. | Negativos, tempo agregado (sinalização do local de acidente, isolamento da área, medições, fotografias de campo) maior. Nota peso de variação 1. |
| Erros | Su et al. (2016) | Positivas, erro pequeno e ajustável diante do controle de altitude do drone e de um bom planejamento e suporte técnico das câmeras e sensores. Nota peso de variação 2. | Negativas são mais suscetíveis a erros diante do contato em solo ou alteração de posições dos objetos. Nota peso de variação 1. |
| Revisão de cena | Su et al. (2016)
Aguiar (2016) |
Positivas, garante um registro permanente que pode ser armazenado em banco de dados e pode ser retomada revisão do local sem atrapalhar fluidez do trânsito. Nota peso de variação 3. | Negativas, devido à dificuldade de revisão da área onde ocorreu o acidente muito tempo posterior ao fato, envolvendo custos econômicos e de fluidez do trânsito. Nota peso de variação 1. |
| Tempo de recolha de provas para medição | Su et al. (2016)
PIX4D (2014) Gomes (2010) |
Positivas, rapidez e agilidade dos drones com possibilidade tanto do material permitir apresentação de medições em tempo real. Auxilia o croqui mais rapidamente. Nota peso de variação 3. | Negativas, procedimento que demanda tempo em solo, devido isolamento mais criterioso da área de acidente e dos vestígios. Nota peso de variação 1. |
| Precisão das medições | PIX4D (2014) | Positivas, precisões equivalentes aos dos métodos tradicionais e na escala dos centímetros. Nota peso de variação 3. | Positivas, garantem confiabilidade. Nota peso de variação 3. |
Fonte: Próprio Autor, 2019.
Gráfico 5.1- Tela Estratégica de Avaliação Geral.
3. CONCLUSÃO
A proposta principal do trabalho apresentou como os drones podem auxiliar a perícia de acidente de trânsito abordando uma metanálise e aplicação como motivação. Foi destinado, primeiramente, uma sistematização das definições das tecnologias dos Veículos Aéreos Não Tripulados. De fato, eles são promissores atualmente no mercado esportivo, de negócios, aplicações gerais e entre outros. Essa sistematização visou comentar os trabalhos aplicados em áreas específicas abordando algumas vantagens, limitações e outras observações em geral.
Como segunda etapa foi construído um modelo simulado simples de aplicação das imagens da tecnologia UAV em um hipotético sinistro baseado na literatura disponível sobre o assunto e numa abordagem mais prática, visto que, os resultados evidenciaram uma produção modelada na qual poderiam ser usufruídas colheitas de identificações e medições do terreno, da área de influência, das marcas, dos automóveis e possíveis vestígios deixados no local. Os resultados obtidos foram simples, mas com baixo erro dos pontos de controle na ordem de 0.0443319 m o que indicou confiabilidade nos resultados, principalmente se o perito pretender realizar medições pelo produto gerado. A modelagem utilizando as imagens capturadas pelo drone só reforçou, ainda mais, as afirmações de diversos pesquisadores que apoiam o uso de novas tecnologias e softwares em conjunto nas aplicações de diversas áreas, o que não seria diferente no caso da perícia de acidentes de automóveis.
A Tela estratégica foi um método utilizado para apresentar em ordem quantitativa os pesos dos parâmetros escolhidos e fundamentados entre diversos existentes quando se fala em tecnologia dos drones em geral. Desse modo, na avaliação comparativa dos métodos tradicionais versus métodos aplicados com os drones na perícia de acidentes de trânsito, não foi pretendido desqualificar os métodos tradicionais, mas apresentar como os benefícios da tecnologia dos drones podem auxiliar os modelos que são aplicados ao longo de muitos anos. Os maiores benefícios dos drones identificados foram a eficiência técnica, a eficiência econômica, a cobertura de área, os itens capturados, o tempo geral de operação, os menores erros (pode ser encontrado no apêndice o exemplo da acurácia dos pontos de base conectados no ajuste) e a possibilidade de revisão da cena do acidente, sendo este último associado com o emprego dos softwares de modelagens.
Por fim, destaca-se que os drones, termo adotado genericamente nesse trabalho, UAVs em específico, podem ser aplicados na área de perícia de acidente de trânsito e auxiliarão o perito em todo o processo de colheita de provas e estudo relativo dos fatos, desde que os processos posteriores sejam resguardados com confiabilidade e qualidade de produção.
REFERÊNCIAS
ABD. Associação Brasileira de Drones. Drones na Segurança Pública. 2017. Disponível em:< https://www.associacaobrasileiradrones.org/drones-na-seguranca-publica/>. Acesso em: 26 mar. 2019.
AGUIAR, J. J. P D.R. Reconstituição Científica de Acidentes de Viação: Metodologias de Investigação. Doctoral dissertation, Universidade do Porto, 2016.
DECEA. Departamento de Controle do Espaço Aéreo. Disponível em: < https://www.decea.gov.br/?i=midia-e-informacao&p=pg_noticia&materia=voos-de-rpas-drones-entenda-a-nova-legislacao-do-decea> . Acesso em: 26 mar. 2019
DJI. Imagem. 2019. Altura: 218 pixels. Largura: 335pixels. 37.5 Kb. Formato PNG. Disponível em:< https://www.dji.com/br/phantom-4-pro-v2?site=brandsite&from=landing_page >. Acesso em 29 de mar. 2019.
ELLOUMI, M. et al. Monitoring road traffic with a UAV-based system. In: IEEE Wireless Communications and Networking Conference (WCNC). IEEE, p. 1-6, 2018.
GOMES, C.S.P. Investigação de Acidentes Rodoviários: recolha de informação. Dissertação submetida para a satisfação parcial dos requisitos do grau de Mestre em Engenharia de Segurança e Higiene Ocupacional, Universidade do Porto. 2010.
MA, Minhua; ZHENG, Huiru; LALLIE, Harjinder. Virtual reality and 3D animation in forensic visualization. J Forensic Sci, 2010.
MEDEIROS, J.A. D. M.; PATRIOTA, R. C.; TORRES, S. M. Proposta de Uso de Drones na realização de Perícias em Patrimônio Histórico: abordagem experimental nas ruínas da primeira fábrica de cimento Portland da América Latina. Revista Brasileira de Ciências Policiais, v. 8, n. 2, p. 205-221, 2018.
OLIVEIRA, A.E; et al. Visualização Interativa 3D e Simulação de Dinâmica de Acidentes de Trânsito em Forense utilizando a Blender Game Engine em um Serious Game. In: XII Simpósio Brasileiro de Games e Entretenimento Digital, Trilha de Arte e Design, 2013, São Paulo, SP. Anais do SBGames, 2013.
PASQUALINI, A. O Uso de Veículos Aéreos Não Tripulados em locais de crime. In: Anais do CONGRESSO NACIONAL DE CRIMINALÍSTICA, 22., 2013, Brasília/DF.
______. Drones em perícias de engenharia forense e crimes contra o meio ambiente. Revista A Barriguda. Campina Grande, v. 06, n. especial, p. 522-537, ago. 2016.
PIX4D. UAV based collision and crimes scene investigation: Protocol description and quality assessment. Disponível em: <https://s3.amazonaws.com/mics.pix4d.com/KB/documents/Pix4D+White+Paper_UAV+based+CSI.pdf> . Acesso em: 26 mar. 2019.
PRF. Polícia Rodoviária Federal. Manual de Atendimento de Acidentes de Trânsito. Vol. 2.0, 2015.
______. Acidentes. Disponível em:< https://www.prf.gov.br/portal/dados-abertos/acidentes> . Acesso em: 27 mar. 2019.
SILVA, R. F. Simulação de Acidentes e Técnicas de Registro e Recolha de Informação. Lisboa: Instituto Superior Técnico, 2004.
SU, Sen et al. Developing an unmanned aerial vehicle-based rapid mapping system for traffic accident investigation. Australian journal of forensic sciences, v. 48, n. 4, p. 454-468, 2016.
ZULKIPLI, M. A.; TAHAR, K. N. Multirotor UAV-Based Photogrammetric Mapping for Road Design. International Journal of Optics, v. 2018, 2018.
APÊNDICE A
ERRO DOS PONTOS DE CONTROLE
| Label | XY error (m) | Z error (m) | Error (m) | Projections |
| P01 | 0.0471072 | -0.0105461 | 0.0482733 | 20 |
| P02 | 0.0571774 | 0.01288 | 0.0586102 | 54 |
| P03 | 0.0112636 | -0.00190155 | 0.0114229 | 39 |
| Total | 0.0432636 | 0.00967352 | 0.0443319 |
Fonte: Autor.
[1] Engenheiro Sanitarista e Ambiental – Universidade Federal do Recôncavo da Bahia – UFRB. Pós-graduando em Geotecnologias – Soluções de Inteligência Geográfica pela Escola de Engenharia Eletromecânica da Bahia – EEEMBA.
[2] Eng. Agrimensor – UFV, Mestre Eng. Cartográfica – IME, Especialista em Análise, Projeto e Gerência de Sistemas – PUC-Rio, Mestre em Engenharia Cartográfica pelo Instituto Militar de Engenharia.
Enviado: Maio, 2019.
Aprovado: Junho, 2019.


Uma resposta
top..estava procurando os efeitos muito bom, melhor dica
obrigado, já estou aplicando em meus projetos.