ARTICLE ORIGINAL
LOPES, Leonardo de Magalhães [1], PEIXOTO, Zélia Myriam Assis [2]
LOPES, Leonardo de Magalhães. PEIXOTO, Zélia Myriam Assis. Un filtre Kalman étendu, avec matrices de covariance prédéfinies, appliqué au contrôle de vitesse sans capteur des moteurs à induction en trois phases. Revista Científica Multidisciplinar Núcleo do Conhecimento. An 05, Ed. 09, Vol. 02, p. 109-126. septembre 2020. ISSN: 2448-0959, Lien d’accès: https://www.nucleodoconhecimento.com.br/ingenierie-electrique/filtre-kalman
RÉSUMÉ
Avec l’émergence de méthodes de contrôle sans capteur, il était nécessaire d’utiliser des estimateurs et/ou des observateurs de l’État pour lui donner la robustesse et la précision requises dans la commande des moteurs à induction. Ce travail porte sur l’application du filtre Kalman étendu (EKF) dans l’estimation de la vitesse et de la position du rotor, visant à mettre en œuvre la technique indirecte de contrôle vectoriel dans un système de contrôle de vitesse sans capteur pour les moteurs à induction en trois phases. Le développement mathématique des variables d’état du système associées au processus stochastique ekf est présenté dans cette étude, et souligne son application dans des conditions variables de vitesse et de charge, qui sont imposées à ces moteurs dans la vie quotidienne. La stratégie de contrôle sans capteur a été testée à travers des lignes de routine dans le Matlab® software, simulant les conditions de fonctionnement de ce type de moteur, étant prouvé ses performances, ainsi que les temps de convergence compatibles avec les exigences habituelles des systèmes de haute performance. Les principales contributions de ce travail sont l’utilisation d’un EKF à commande réduite (ROEKF) et le préréglage des matrices de covariance pour accélérer la convergence des estimations de vitesse et de position pour les futures implémentations dans les processeurs de signaux numériques actuellement accessibles.
Mots clés: EKF, Filtre Kalman étendu, Moteurs à induction, Sans capteur, systèmes d’entraînement électrique CA.
1. INTRODUCTION
Au cours des dernières décennies, les applications des systèmes d’entraînement à courant alternatif (CA), associés aux techniques de lutte antivectorielle avec la vitesse et/ou la surveillance de la position au moyen de capteurs électromécaniques, se sont imposées comme une alternative à faible coût, une plus grande robustesse mécanique et une haute performance, équivalant aux précurseurs des disques CC. Toutefois, l’utilisation de transducteurs électromécaniques comporte toujours des limites en ce qui concerne les coûts d’entretien, la fiabilité, la robustesse mécanique et les restrictions de fonctionnement dans les environnements difficiles (DADKHAH et al., 2015).
Dans ce contexte et depuis l’émergence de processeurs numériques à haute vitesse, les systèmes de contrôle de vitesse et/ou de position sans capteur, bien qu’ils impliquent l’augmentation de la complexité mathématique et computationnelle des modèles de contrôle, ont été de plus en plus utilisés car ils contribuent à la robustesse mécanique et à la variation des paramètres et incertitudes de la machine intrinsèques aux mesures des signaux électriques (BARUT et al., 2008).
Plusieurs études ont été développées visant les systèmes sans capteurs, où la technique du mode coulissant, les systèmes adaptatifs par modèle de référence (Model Reference Adaptive System) et extended Kalman Filter (EKF – Extend Kalman Filter), entre autres (VIEIRA et al., 2014).
Rudolf Emil Kalman a présenté, en 1960, une solution récursive au problème du filtrage linéaire discret à partir du modèle dans l’espace des états ainsi que des parcelles stochastiques se référant aux bruits de mesure et aux erreurs de modélisation. Toutefois, la version initiale du filtre Kalman ( KF – Kalman Filter) comporte des limites par rapport aux caractéristiques non ligneaires telles que les moteurs à induction (MI), les
relation entre la vitesse électromagnétique et les flux ainsi que la présence de paramètres variables dans le temps associés à ces variables (BARUT et al., 2007).
Une alternative à KF est le filtre Kalman étendu (EKF) dont la structure peut être appliquée aux systèmes linéarisés autour d’un point de fonctionnement spécifique. D’autres variantes du filtre Kalman sont disponibles, telles que le Unscented Kalman Filter (UKF) Akin et al. (2003), l’EKF Combinado S. Bogosyan et Gokasan (2007), Bi Input-extended Kalman Filter (Bi-EKF), entre autres.
Dans Barut (2010), l’UKF est associé au modèle nonlinaire de MI et à une méthode de filtrage de la matrice de covariance. Cette combinaison a généré le SRUKF (Square Root UKF), avec des améliorations de précision par rapport à la version UKF.
À Jafarzadeh et al. (2013), la mise en œuvre en temps réel de l’estimateur EKF de commande complète avec double entrée ou Bi-EKF est décrite. Le Bi-EKF est basé sur deux modèles mathématiques, l’un pour le débit de stator et l’autre pour le flux du rotor dans le cadre stationnaire, fournissant l’estimation complète de tous les états moteurs à induction en conjonction avec les résistances du stator et du rotor, dans une large gamme de vitesse (BARUT et al. 2012).
Une autre méthode dérivée de l’EKF est le filtre Kalman étendu à ordre réduit (ROEKF – Reduced-Order Extended Kalman Filter) qui, avec moins de variables, fournit la réduction du temps de traitement et des erreurs d’estimation sans compromettre les performances du système (YIN et al., 2013) (LEITE et al., 2004).
L’estimation de la vitesse/position de l’IM nécessite la connaissance des tensions et des courants du stator, mais le nombre total de variables et de paramètres à traiter peut s’étendre jusqu’à 10, ce qui rend le traitement en ligne impossible. Il convient de noter que l’exactitude des estimations des variables de contrôle dépend fortement des PARAMÈTRES de l’IM et du rapport de bruit du signal (SNR – Signal Noise Ratio) des signaux mesurés (LEITE et al., 2004).
Ce travail propose l’application d’un filtre Kalman étendu à ordre réduit, en particulier un ROEKF de 5ème ordre, pour estimer la vitesse et la position d’un moteur à induction en trois phases basé sur les composants orthogonaux du courant de stator et du flux du rotor.
Visant à réduire le temps de traitement et la mise en œuvre future à l’aide du processeur de signal numérique du fabricant d’instruments du Texas, le modèle TMDSHVMTRPFCKIT, une alternative aux 6e et 7e ordres EKF habituellement appliqués qui comprennent les composants de courant de stator, les flux électromagnétiques du rotor et les résistances au stator et au rotor (DADKHAH et al., 2015) (BOGOSYAN et GOKASAN, 2007) (BARUT, 2010) (BARUT et al., 2012).
Les principales contributions de ce travail se réfèrent aux analyses roekf relatives à la précision et à la convergence de l’estimation de la vitesse dans différentes conditions de fonctionnement et de charge, ainsi qu’à l’adaptation, au développement et à l’essai des techniques de réglage hors ligne des matrices de covariance des erreurs et mesures de modélisation.
2. CADRE THÉORIQUE
Dans cette section sera présenté les concepts fondamentaux liés au modèle mathématique de trois phases MI, filtre Kalman étendu et les techniques de réglage hors ligne des matrices de covariance, nécessaires pour le développement de la ROEKF 5ème ordre pour l’application dans un système de contrôle de vitesse sans capteur (AMEID et al., 2016).
2.1 LE MODÈLE MATHÉMATIQUE DU MOTEUR À INDUCTION EN TROIS PHASES – MI
Le modèle mathématique de MI peut être décrit, dans la référence stationnaire, par les composants du courant de stator
![]()
et du débit du rotor
![]()
et de la vitesse du rotor
![]()
,selon les équations 1 à 3 (KRAUSE et al., 2013):
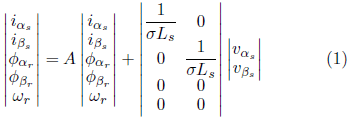
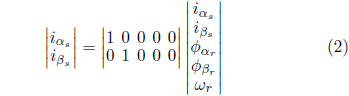
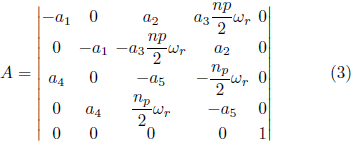
![]()
2.2 LE FILTRE KALMAN ÉTENDU – EKF
L’EMF est basé sur la version continue du filtre Kalman, représentée par les équations linéaires discrètes de barut suivantes (2010): ![]()
Là où ad et bd sont, respectivement, les tableaux distincts de paramètres et d’entrées de processus, et W contient les parcelles liées aux erreurs de modélisation du système.
L’équation de la variable de mesure z(k) est donnée par:
![]()
H étant la matrice d’observation et v(k), le bruit de mesure. Les deux w(k) et v(k) sont des bruits blancs avec zéro moyenne, indépendants les uns des autres et avec la distribution de probabilité normale. L’estimateur de Kalman présente deux étapes pour l’estimation, la prédiction et la correction. Au stade de la prédiction, il faut prédire la projection de l’État dans l’étape avant
![]()
, ainsi que l’incertitude dans l’estimation
![]()
.

![]()
est la matrice de covariance de l’erreur d’estimateur dans l’instant avant l’observation actuelle,
![]()
est la transposition de la matrice discrète des paramètres et Q est la matrice de covariance des bruits de processus.
L’étape de correction, nécessaire pour atteindre l’état estimé
![]()
, est formulée à travers une équation qui associe l’état estimé dans la prédiction de la mesure à la différence entre la valeur réelle mesurée et la valeur prévue. Au stade de correction, vous avez les équations de mise à jour de
![]()
la mesure ainsi que l’incertitude de l’estimation
![]()
.

Où P(k) est la matrice de covariance de l’erreur d’estimation actuelle et je suis la matrice d’identité.
La différence
![]()
indique la divergence entre la mesure a priori estimée et la mesure actuelle z(k). La matrice K, appelée matrice des gains kalman filter, permet de minimiser la covariance de l’erreur de processus et est représentée par :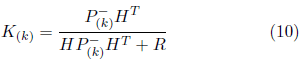
Récursivement, le processus est répété à partir des résultats estimés a posteriori dans la recherche de la prédiction des états a priori.
Basé sur la version KF, le filtre Kalman étendu est un observateur stochastique qui utilise des signaux antibruit indiqués pour l’estimation des variables dans les systèmes non linéaires représentés par la fonction f, décrits de façon générique selon les équations (11) et (12) :![]() Comme les bruits w(k-1) et v (k) ne sont pas connus à chaque étape, les vecteurs et les mesures d’état sont approximatifs, compte tenu de w(k-1) = 0 et v(k) = 0 (BARUT et al., 2012):
Comme les bruits w(k-1) et v (k) ne sont pas connus à chaque étape, les vecteurs et les mesures d’état sont approximatifs, compte tenu de w(k-1) = 0 et v(k) = 0 (BARUT et al., 2012):
![]() Les équations linéaires à travers les fonctions F et H sont des matrices jacobiennes calculées à chaque intervalle de temps. De même que les équations KF, les étapes de la prévision et de la mise à jour des mesures EKF sont écrites comme suit:
Les équations linéaires à travers les fonctions F et H sont des matrices jacobiennes calculées à chaque intervalle de temps. De même que les équations KF, les étapes de la prévision et de la mise à jour des mesures EKF sont écrites comme suit:

Le gain de filtre est ensuite calculé comme :

3. DÉVELOPPEMENT
3.1 APPLICATION EKF AU CONTRÔLE MOTEUR À INDUCTION
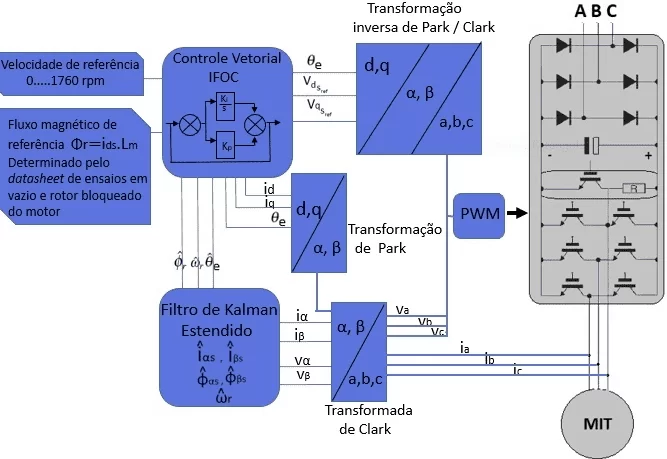
La figure 1 montre le système de contrôle de vitesse sans capteur associé au filtre Kalman étendu à ordre réduit. Le système de contrôle de vitesse proposé est basé sur la technique de contrôle indirect orienté sur le champ (IFOC – Indirect Field Oriented Control), qui suppose la connaissance de la vitesse et de la position du rotor pour les transformations entre les systèmes d’axe de référence, les mailles de découplage du stress stator et les contrôleurs PI utilisés (LI et ZHONG, 2005).
Ainsi, le vecteur d’État à estimer par ROEKF doit être composé comme:![]() Lorsque l’angle du vecteur de flux magnétique du rotor et la vitesse estimée
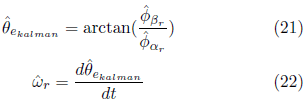
Lorsque l’angle du vecteur de flux magnétique du rotor et la vitesse estimée![]() sont calculés (EL-HALIM et al., 2012):
sont calculés (EL-HALIM et al., 2012):
Les principales étapes de la mise en œuvre des systèmes d’entraînement à induction sans capteur, à l’aide de l’algorithme ROEKF, sont les suivantes (EL-HALIM et al. 2012) :
- Sélection du modèle discret de machine à induction;
- Initialisation des matrices de covariance Q, P et R;
- Implémentation de l’algorithme ROEKF.
Figure 1. Contrôle vectoriel sans capteur IFOC avec estimateur de vitesse ROEKF.
Le diagramme de la figure 2 présente les étapes d’exploitation EKF.
Figure 2. EKF Operation Flowchart – Étapes de prévision et de correction.
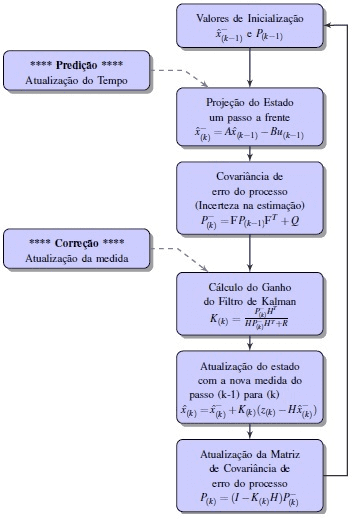
Au départ, l’initialisation des estimations
![]()
et la matrice de covariance des erreurs p(k-1) sont effectuées. Ensuite, la mise à jour ou la projection d’une longueur d’avance sur l’état
![]()
et la covariance des erreurs des estimations
![]()
, dans l’état actuel, est obtenue à partir de la gamme de paramètres du moteur annonce et entrées Bd et vous (k-1).
Les Matrices Covariance P, Q et R, présentes dans les étapes du processus, sont initialisées en fonction de la prédisposition aux incertitudes du processus d’estimation des variables d’état sélectionnées.
La correction est apportée par la différence entre la valeur mesurée réelle et la valeur prévue. Cette différence est minimisée par l’action du gain K sur l’estimation
![]()
et sur la covariance de l’erreur des estimations du système P(k). Récursivement, les valeurs sont mises à jour, à partir d’un nouvel animal de compagnie.
3.2 L’ESTIMATION DE VITESSE À L’AIDE D’EKF
Sur la base des équations (15) à (19), l’estimation de la vitesse mi sera obtenue à l’aide des expressions ci-dessous.
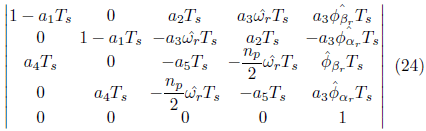
3.2.1 ÉTAPE DE PRÉVISION

C’est-à-dire que F(k) est donné par:
3.2.2 ÉTAPE DE CORRECTION

À partir des équations (17) et (18), le vecteur des états estimés
![]()
et les covariances des erreurs d’estimation
![]()
sont corrigés selon les expressions : Àchaque mesure, le filtre stocke les matrices calculées à l’étape précédente et revient au début du processus afin d’estimer les valeurs suivantes
Àchaque mesure, le filtre stocke les matrices calculées à l’étape précédente et revient au début du processus afin d’estimer les valeurs suivantes
![]()
et
![]()
jusqu’à ce que la convergence EKF soit obtenue.
3.3 RÉGLAGE HORS LIGNE DES MATRICES DE COVARIANCE P ET Q
La performance de l’estimation est directement affectée par les valeurs choisies pour l’initialisation des matrices de covariance Q, P et R, le plus souvent basées sur des essais et des erreurs (RAYYAM et al., 2018). Plusieurs études ont été développées pour répondre à l’harmonie de ces matrices.
Dans Zerdali et Barut (2017), les auteurs utilisent un algorithme d’évolution différentielle (DEA) et un DEA multi-objectifs (MODEA) associé à différentes fonctions d’adéquation.
Yin et al. (2017) utilise une séquence de plusieurs filtres EKF (MM-EKF), où différents poids sont attribués à chaque terme de l’ensemble permettant l’introduction de nouvelles informations et, par conséquent, l’amélioration des performances et la réduction des estimations erreur.
Dans Wallscheid et al. (2018), un projet conjoint est présenté pour observer la vitesse, le débit, le couple et l’estimation des paramètres électriques de la MI au moyen d’un UKF. Bien que l’UKF ait montré une meilleure approximation linéaire par rapport à l’EKF, l’estimateur de l’UKF a montré une plus grande sensibilité au bruit des mesures en ligne, conduisant à une précision plus faible des estimations de vitesse et de couple.
La méthode proposée ici pour le réglage hors ligne pour l’initialisation des matrices de covariance Q et P a été développée à partir d’Estevam et al. (2014), où l’absence d’équations mécaniques dans le modèle EKF entrave la convergence de l’estimation de la vitesse, généralement obtenue par le réglage du gain de filtre. Les termes de la matrice diagonale P5x5, qui sont corrélés avec une attente plus élevée d’incertitudes dans l’estimation, et les termes de la matrice diagonale Q5x5 qui sont corrélés avec une plus grande prédisposition au bruit du processus d’estimation devraient assumer des valeurs élevées, respectivement pour p55 et q55, et des valeurs inférieures pour q11 et q33. Les influences de P et Q sur l’estimation de la vitesse ont été analysées avec le système de commande fonctionnant en maille ouverte, c’est-à-dire que l’EKF n’influence pas la logique des contrôleurs PI de la commande vectorielle.
Le réglage hors ligne des matrices de covariance des incertitudes d’estimation, du bruit et de la mesure du système P, Q et R, est basé sur la connaissance du comportement dynamique du moteur d’induction et l’application d’outils statistiques à travers la valeur attendue, moyenne, la distribution de probabilité gaussienne, la variance et la covariance. De cette façon, les valeurs pour les termes des matrices sont obtenues.
4. RÉSULTATS DE SIMULATION
Les simulations ont été réalisées dans MatLab®, compte tenu du contrôle en maille ouverte et en maille fermée en utilisant les valeurs estimées par EKF.
Les données utilisées dans la simulation provenaient du modèle moteur 5K33GN2 – Marathon (Regal Beloit Corporations), disponible en www.regalbeloit.com/Products/Catalog. Ces caractéristiques ont été adoptées dans les simulations, visant le stade de la mise en œuvre pratique.
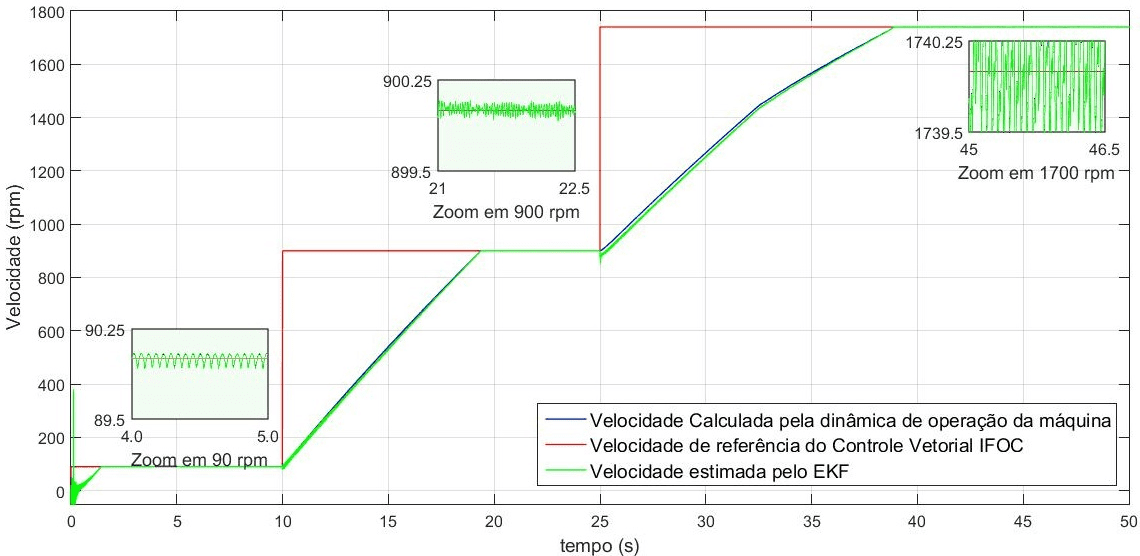
Le profil de vitesse comprenait des références à 90 tr/min, 900 tr/min et 1740 tr/min, soit l’équivalent de 5 %, 50 % et 100 % de la vitesse nominale du moteur à induction, avec une fréquence de mise en page des IGBT à 4 kHz, dans des conditions de fonctionnement vides et avec la charge.
Les valeurs, estimées à partir de l’algorithme EKF, pour le flux conjugué et électromagnétique, la vitesse et la position mécanique du rotor ont été appliquées à la place des variables nécessaires à la lutte antivectorielle.
Les expressions (28), (29) et (30) indiquent les matrices réglées pour les résultats de la simulation. Où:
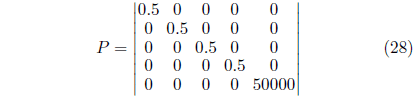
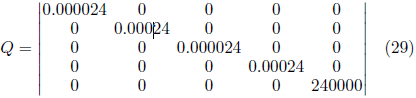
![]() Le graphique illustré à la figure 3 atteste de la convergence de l’ekf dans la précision de l’estimation, que ce soit à des vitesses proches de zéro, des vitesses intermédiaires ou une vitesse nominale. L’estimation présente des valeurs proches de la vitesse de référence et de la vitesse calculée par le modèle mathématique du moteur d’induction.
Le graphique illustré à la figure 3 atteste de la convergence de l’ekf dans la précision de l’estimation, que ce soit à des vitesses proches de zéro, des vitesses intermédiaires ou une vitesse nominale. L’estimation présente des valeurs proches de la vitesse de référence et de la vitesse calculée par le modèle mathématique du moteur d’induction.
Figure 3. Vitesse variable (90rpm, 900rpm et 1740 tr/min).
Le graphique de la figure 4 montre la réponse dynamique de l’EKF à la position mécanique du rotor, avec convergence dans l’estimation des valeurs proches de la position mécanique calculée par le modèle mathématique du moteur à induction.
Figure 4. Position dans les radians dans le temps (-π, 0, π).
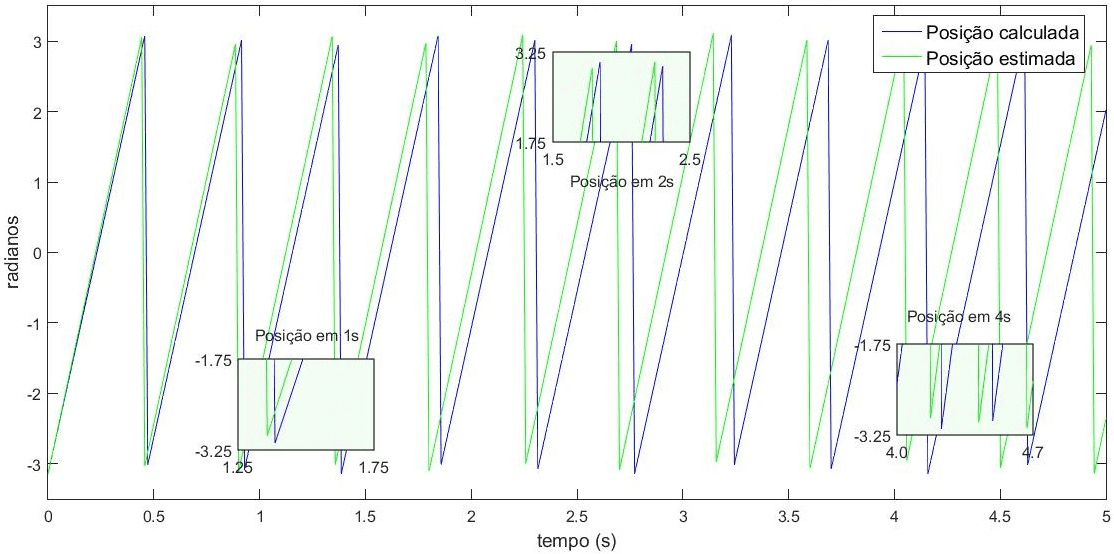
Prenant la mesure de la position chez les radians dans le temps, avec une trajectoire allant de π à π, l’estimateur EKF démontre la précision et la convergence à des vitesses inférieures, par exemple 90 tr/min, ainsi qu’à des vitesses moyennes. Écarts par rapport aux 25 secondes de la figure 3, où la vitesse est passée à 1740 tr/min. Dans ce cas, les écarts sont dus à la logique de mise à jour des estimations, qui sont directement liées à la matrice P de la covariance des erreurs d’estimation. Les incertitudes des estimations présentent des preuves dues aux itérations des valeurs traitées par la phase de prédiction et, plus tard, à la correction des estimations.
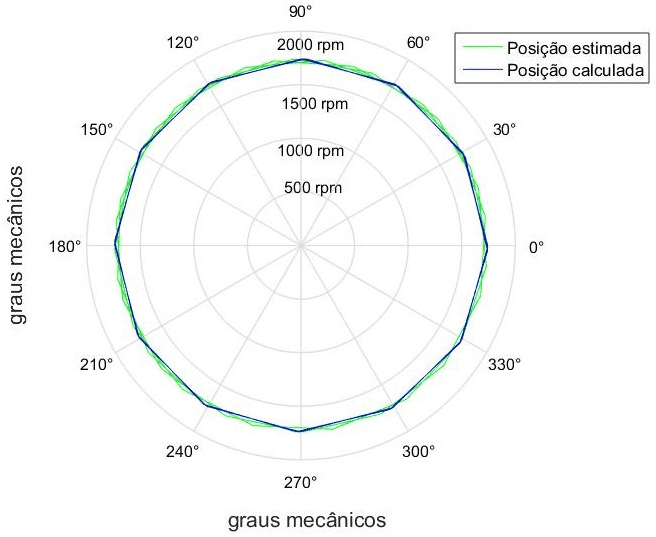
Le graphique illustré à la figure 5 décrit la variation de la position mécanique du rotor en degrés.
Figure 5. Position en degrés 0°… 360° allant avec 90rpm, 900rpm, et 1740 tr/min vitesse.
Où:
![]()
Cependant, la présence d’oscillations autour des valeurs de référence est observée. Ces oscillations peuvent être réduites au minimum en ajustant et en accordant l’EKF, essentiellement sur les matrices de covariance Q, R, P et K de l’EKF. Les plus grandes oscillations se distinguent en fonctionnement à des vitesses faibles et transitoires.
Lorsque la matrice P de la covariance d’erreur d’estimateur d’état s’approche de zéro, la matrice Gain K agit moins intensément pour minimiser l’écart entre les valeurs de prédiction et les mesures prises sur le modèle de machine.
Si des valeurs plus élevées sont adoptées pour les éléments de la matrice de covariance du bruit (Q), il y a un degré plus élevé d’incertitude concernant les estimations des états du système, ce qui implique l’augmentation de la matrice de gain K et une augmentation de la vitesse de convergence de l’estimation.
L’augmentation des valeurs des éléments de la matrice de covariance des bruits de mesure des courants et des tensions, R, implique la diminution de la matrice du gain K, qui agit dans la réduction de la vitesse de réponse de l’EKF.
5. Conclusions
Les résultats simulés indiquent la viabilité de l’estimateur en fonction des indications de sa capacité à répondre aux variations de vitesse imposées au système de commande, ainsi que les différentes conditions de charge imposées au moteur.
Des conditions de fonctionnement du moteur à induction avec des charges différentes, jusqu’à 400N, soit environ 40 kg de poids, ont été simulées. Les valeurs de charge sont basées sur la capacité du couple mécanique du moteur, selon la fiche technique du constructeur, étant de 1,1 N.m avec une vitesse nominale de 1725 tr/min.
L’estimation EKF présente la convergence avec les valeurs de référence et les valeurs calculées, en fonction de la dynamique d’opération imposée à chaque condition de charge.
Avec les résultats présentés, il est prévu de mettre en œuvre la solution dans un matériel pour le contrôle numérique des moteurs en utilisant le processeur de signal numérique du fabricant Texas Instrument, modèle TMDSHVMTRPFCKIT avec plaque de commande F28035 et un moteur asynchrone triphasé à induction à cage écureuil, modèle 5K33GN2, du fabricant Marathon (Regal Beloit Corporations), disponible chez PPGEE – PUCMINAS.
6. RÉFÉRENCES
AKIN, B., ORGUNER, U., and ERSAK, A. (2003). State estimation of induction motor using unscented Kalman Filter. IEEE Conference on Control Applications, 915-919.
AMEID, T., MENACER, A., TALHAOUI, H., HARZELLI, I., and AMMAR, A. (2016). Simulation and real-time implementation of sensorless field oriented control of induction motor at healthy state using rotor cage model and ekf. 8th International Conference on Modelling, Identification and Control, 695-700.
BARUT, M. (2010). Bi input-extended Kalman Filter based estimation technique for speed-sensorless control of induction motors. Energy Conversion and Management, 2032-2040.
BARUT, M., BOGOSYAN, S., and GOKASAN, M. (2007). Speed sensorless estimation for induction motors using extended Kalman Filters. IEEE Transactions on Industrial Electronics, 272-280.
BARUT, M., BOGOSYAN, S., and GOKASAN, M. (2008). Experimental evaluation of braided ekf for sensorless control of induction motors. IEEE Transactions on Industrial Electronics, 620-632.
BARUT, M., DEMIR, R., ZERDALI, E., and INAN, R. (2012). Real-time implementation of bi input-extended Kalman Filter-based estimator for speed-sensorless control of induction motors. IEEE Transactions on Industrial Electronics, 4197-4206.
DADKHAH, R., GIVI, H., and MEHDIPOUR, A. (2015). Parameter estimation of the induction motor using extended Kalman Filter for wide range speed control. The 6th International Power Electronics Drive Systems and Technologies Conference (PEDSTC2015), 137-142.
EL-HALIM, A.F.A., ABDULLA, M.M., and EL-ARABAWY, I.F. (2012). Simulation aides in comparison between different methodology of field oriented control of induction motor based on flux and speed estimation. 22nd International Conference on Computer Theory and Applications (ICCTA), 117-121.
ESTEVAM, E.G.A., PEIXOTO, Z.M.A., and FERREIRA, F.M.F. (2014). Aplicação EKF e as técnicas DTC-MTPA ao controle de velocidade sensorless do ipmsm. 20º Congresso Brasileiro de Automática, 1348-1355.
JAFARZADEH, S., LASCU, C., and FADALI, M.S. (2013). Square root unscented Kalman Filters for state estimation of induction motor drives. IEEE Transaction on Industry Applications, 92-99.
KRAUSE, P., WASYNCZUK, O., SUDHOFF, S., and PEKAREK, S. (2013). Analysis of Electric Machinery and Drive Systems. Wiley-IEEE Press, New Jersey.
LEITE, A.V., ARAUJO, R.E., and FREITAS, D. (2004). Full and reduced order extended Kalman Filter for speed estimation in induction motor drives: A comparative study. 35th Annual IEEE Power Electronics Specialists Conference, 2293-2299.
LI, J. and ZHONG, Y. (2005). Comparison of three Kalman Filters for speed estimation of induction machines. 40th Annual Meeting of the IEEE Industry Applications Society, 1792-1797.
RAYYAM, M., ZAZI, M., and BARRADI, Y. (2018). A new metaheuristic unscented Kalman Filter for state vector estimation of the induction motor based on ant lion optimizer. COMPEL – The international journal for computation and mathematics in electrical and electronic engineering, 1054-1068.
S. BOGOSYAN, M.B. and GOKASAN, M. (2007). Braided extended Kalman Filters for sensorless estimation in induction motors at high-low/zero speed. IET Control Theory and Applications, 987-998.
SHI, K.L., CHAN, T.F., WONG, Y.K., and HO, S.L. (2002). Speed estimation of an induction motor drive using an optimized extended Kalman Filter. IEEE Transactions on Industrial Electronics, 124-133.
VIEIRA, R., GASTALDINI, C.C., AZZOLIN, R.Z., and GRUNDLING, H.A. (2014). Sensorless sliding-mode rotor speed observer of induction machines based on magnetizing current estimation. IEEE Transactions on Industrial Electronics, 4573-4582.
WALLSCHEID, O., SCHENKE, M., and BÖCKER, J. (2018). Improving torque and speed estimation accuracy by conjoint parameter identification and unscented Kalman Filter design for induction machines. International Conference on Electrical Machines and Systems ICEMS, 1181-1186.
YIN, Z., LI, G., ZHANG, Y., LIU, J., SUN, X., and ZHONG, Y. (2017). Speed and flux observer of induction motor based on extended Kalman Filter and Markov chain. IEEE Transactions on Power Electronics, 7096-7117.
YIN, Z., ZHAO, C., LIU, J., and ZHONG, Y. (2013). Research on anti-error performance of speed and flux estimator for induction motor using robust Reduced-Order EKF. IEEE Transactions on Industrial Informatics, 1037-1046.
ZERDALI, E. and BARUT, M. (2017). The comparisons of optimized extended Kalman Filters for speed-sensorless control of induction motors. IEEE Transactions on Industrial Electronics, 4340-4351.
[1] Maîtrise en génie électrique et ingénieur en électronique et télécommunications.
[2] Doctorat en génie électrique.
Soumis : août 2020.
Approuvé : septembre 2020.