ARTIGO ORIGINAL
MENDONÇA, Luan Aleixo Canário [1]
MENDONÇA, Luan Aleixo Canário. Controle escalar de velocidade e partida de motores de indução utilizando inversores. Revista Científica Multidisciplinar Núcleo do Conhecimento. Ano 06, Ed. 01, Vol. 02, pp. 14-36. Janeiro de 2021. ISSN: 2448-0959, Link de acesso: https://www.nucleodoconhecimento.com.br/engenharia-eletrica/utilizando-inversores
RESUMO
Este trabalho apresenta a aplicação de um inversor de frequência trifásico no controle de velocidade e partida de um motor de indução. O controle da velocidade é realizado através da técnica de fluxo constante, ou também comumente chamada de controle V/F. Inicialmente é apresentado a versão em malha aberta do controle V/F, capaz de atingir a velocidade de referência mantendo o torque desenvolvido aproximadamente constante. Em seguida, é apresentada a versão em malha fechada do controle V/F, que através da implementação de um controlador PI, acrescenta ao controle em malha aberta a capacidade de rejeitar perturbações na velocidade decorrentes de variações do tipo degrau no torque da carga. Para a implementação da partida suave, é desenvolvido um algoritmo de aplicação de tensão em rampa com ângulos e valores iniciais ajustáveis. As simulações dessa etapa destacam a redução obtida na corrente de partida, e o consequente aumento do tempo que o motor leva para atingir o regime permanente.
Palavras-chave: Inversor de frequência trifásico, controle de velocidade de motor de indução, controle V/F, partida em rampa.
1. INTRODUÇÃO
É possível verificar uma grande quantidade de aplicações onde o controle da rotação das máquinas trouxe avanços aos processos de produção existentes e abriu caminho para a criação de novos métodos para as diversas etapas do ciclo produtivo. Como exemplos é possível citar: capacidade de alterar a velocidade global de um processo industrial tornando o mais eficiente e reduzindo desperdícios de matéria prima, economia de energia, principalmente em aplicações que envolvam bombas centrífugas e ventiladores (os quais apresentam consumo de energia proporcional ao cubo da velocidade), e ainda, a existência de certos tipos de indústrias como as de papel e celulose que não funcionam sem o controle de velocidade (FRANCHI, 2013).
Máquinas de indução, as mais robustas e mais amplamente utilizadas na indústria, são também, essencialmente, máquinas de velocidade constante quando conectadas a fontes de tensão e frequência constantes (SEN, 1996).
O objetivo desse trabalho é desenvolver as etapas de projeto de um inversor de frequência trifásico acionado pela técnica Sinusoidal Pulse Width Modulation (SPWM), com o objetivo de controlar velocidade e partida de um motor de indução trifásico através do controle escalar V/F – Volts/Hertz.
O desenvolvimento seguirá partindo desde a implementação do algoritmo de disparo das chaves estáticas, seguindo da simulação do circuito em malha aberta (controle em regime permanente sem medição de velocidade), projeto de um controlador PI, com o intuito de eliminar erro em regime permanente e rejeitar perturbações do tipo degrau, e posteriormente, realizar a simulação do inversor em malha fechada. Em seguida, será implementado o algoritmo de partida em rampa, e através de simulação, verificar o efeito obtido na corrente do motor.
Ao final deste trabalho, espera-se obter simulações funcionais de um inversor capaz de controlar a velocidade de um motor de indução e de fornecer a opção de partida suave através da aplicação de uma tensão em rampa.
2. FUNDAMENTAÇÃO TEÓRICA
2.1 MOTOR DE INDUÇÃO TRIFÁSICO
Os motores de indução apresentam funcionamento baseado na aplicação de uma corrente alternada diretamente nos enrolamentos do estator, e através de uma relação de transformação, tem-se a corrente no rotor por fenômeno de indução (FITZGERALD; KINGSLEY e UMANS, 2005).
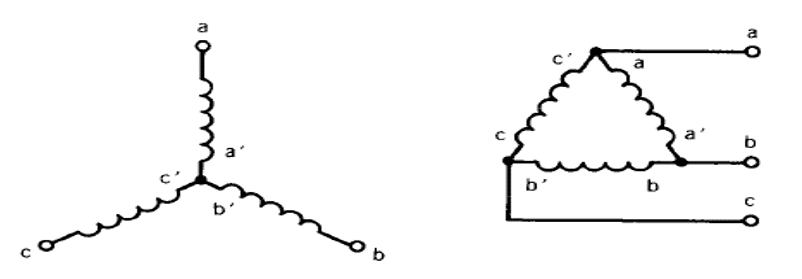
O estator é composto eletricamente por 3 enrolamentos espacialmente separados por 120º. A bobina aa’ é alimentada pela fase a, bem como as bobinas bb’ e cc’ são alimentadas respectivamente pelas fases b e c (SEN, 1996). A conexão elétrica entre os enrolamentos pode ser feita em estrela (Y) ou delta (Δ), como pode ser visto na Figura 1.
Figura 1 – Conexão estrela à esquerda e delta à direita.
2.1.1 PRINCÍPIO DE FUNCIONAMENTO
Ao aplicar uma fonte de tensão trifásica no estator, uma corrente irá fluir por seus enrolamentos e produzir um campo magnético girante com mesma frequência da corrente aplicada. Este campo por sua vez, será o responsável por induzir uma tensão nos enrolamentos do rotor, e consequentemente, promover o surgimento de uma corrente rotórica cujo módulo e defasagem irá depender da impedância do enrolamento. A corrente produzida estará de acordo com a lei de Lenz, “a corrente induzida tende a se opor ao sentido da variação do campo magnético que a produziu” (SEN, 1996). No motor de indução, a variação é dada pela rotação do campo do estator e a reação que ocorre no rotor é tal que este tenta cancelar essa variação. Isto é, o rotor entra em movimento de rotação no mesmo sentido que o campo do estator com o objetivo de cancelar a variação de campo magnético proveniente do movimento relativo entre eles (PINHEIRO, 2009).
2.1.2 ESCORREGAMENTO
Supondo por um instante que ao iniciar o movimento de rotação o rotor atingisse a velocidade do campo girante (velocidade esta denominada de síncrona ns). Neste exato momento, sessaria o movimento relativo entre o rotor e o campo do estator fazendo com que não houvesse mais corrente induzida, e consequentemente, nenhum torque seria produzido (FITZGERALD; KINGSLEY e UMANS, 2005). Na operação das máquinas de indução trifásicas como motor, a velocidade de rotação sempre será inferior a velocidade síncrona, daí o termo designado para este tipo de máquina: motores assíncronos (TORO, 1994).
A diferença relativa de velocidade entre o rotor e o campo girante do estator é denominada de escorregamento (FITZGERALD; KINGSLEY e UMANS, 2005) e é definida como sendo:

Onde n corresponde à velocidade do rotor em rpm – rotações por minuto.
2.2 CONTROLE ESCALAR V/F
Se o controle aplicado à um determinado sistema tiver como objetivo a manipulação de apenas variáveis escalares tais como amplitude de tensão, corrente e frequência, este controle é denominado escalar (BIM, 2012).
A velocidade síncrona de uma máquina de indução pode ser alterada diretamente a partir da variação da frequência da fonte de tensão que alimenta os enrolamentos do estator (FITZGERALD; KINGSLEY e UMANS, 2005).
O fluxo do entreferro de um motor de indução é proporcional à relação entre a tensão induzida com o rotor parado e a frequência (SEN, 1996). Sendo assim, temos:

Considerando que os valores de R1 e X1 (resistência e reatância do estator) sejam suficientemente pequenos, a queda de tensão sobre esses elementos é pequena, e, portanto, é possível realizar a aproximação: V ≅ E (SEN, 1996). Sendo assim, a equação (2) se torna:

Se a frequência da fonte de alimentação for reduzida mantendo a tensão constante, o fluxo no entreferro irá aumentar levando a máquina à saturação, além de provocar o aumento excessivo das correntes do motor devido à redução das reatâncias dos enrolamentos (POMILIO, 2014). Já no caso em que se aumenta a frequência mantendo a tensão fixa, a redução do fluxo no entreferro provoca a queda gradativa do torque da máquina (POMILIO, 2014).
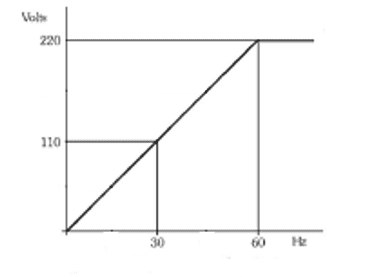
Sendo assim, o controle V/F apresenta como objetivo principal, a capacidade de controlar a velocidade dos motores de indução, e ao mesmo tempo, assegurar a operação com um fluxo essencialmente constante, mantendo a eficiência e o torque máximo dos motores aproximadamente inalterados (TORO, 1994). A Figura 2 mostra o comportamento requerido da tensão para assegurar a existência de um fluxo de entreferro aproximadamente constante.
Figura 2 – Tensão em função da frequência no controle V/F
2.2.1 APLICAÇÕES
A técnica de controle escalar é essencialmente um controle em regime permanente. Isso implica que a principal aplicação para essa técnica está relacionada com a eliminação de erro em regime permanente e com a capacidade de rejeitar variações na velocidade dentro de uma faixa de operação (SUETAKE; SILVA e GOEDTEL, 2007).
Para aplicações que exigem alto desempenho da resposta dinâmica, a técnica mais utilizada é o controle vetorial (BIM, 2012).
Vale ressaltar, que a principal vantagem do controle escalar em relação ao vetorial é a simplicidade e custos de implementação, o que torna uma opção atrativa para as aplicações que não exigem alto desempenho dinâmico (WEG, 2016).
2.2.2 LIMITAÇÕES DO CONTROLE V/F
Na Figura 3, são apresentadas as curvas de torque de um controle V/F em um motor de indução trifásico com 4 polos. Neste gráfico, é considerado que o valor da resistência de estator R1 é nulo.
Figura 3 – Curvas de torque para diferentes valores de frequência considerando a resistência de estator nula.
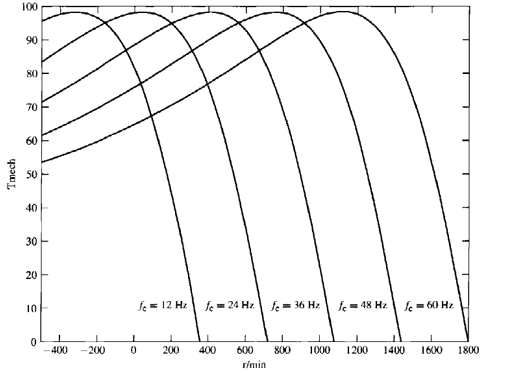
É possível observar, que a partir da aplicação do controle V/F, as curvas de torque sofrem apenas deslocamentos laterais no eixo da frequência, mantendo a forma e os valores máximos de torque inalterados.
Na Figura 4, são apresentadas as mesmas curvas de torque da Figura 3, porém considerando a resistência de estator com um valor não nulo.
Figura 4 – Curvas de torque para diferentes valores de frequência considerando a resistência de estator não nula.
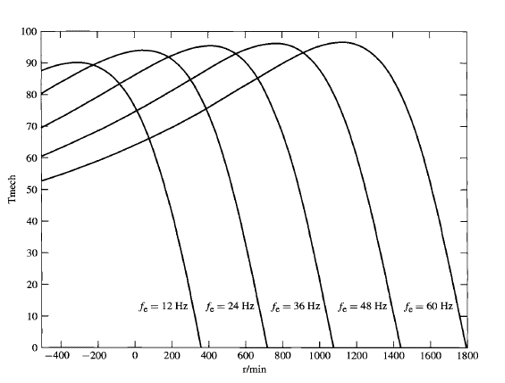
É possível observar, que a consideração da resistência do estator, causa uma pequena redução no torque máximo com a diminuição da frequência da fonte de alimentação. Este fenômeno limita a aplicação do controle V/F a velocidades não muito baixas, pois caso ao contrário, a perda de torque pela influência da resistência de estator e a redução da eficiência por aumento do escorregamento se tornariam consideráveis (FITZGERALD; KINGSLEY e UMANS, 2005).
Para velocidades superiores à frequência nominal do motor, ocorre a região denominada de potência constante, onde para valores de frequência superiores à nominal, o controle V/F não é válido, já que a aplicação de tensões superiores à nominal poderia causar danos ao motor. Portanto, o aumento da frequência acima da nominal causa a redução do fluxo no entreferro, e consequentemente, a perda gradativa de torque do motor (SEN, 1996). Controles que operam na região de potência constante são denominados de field-weakening control, e devido a sua gama de aplicações ser muito restrita, não serão abordados neste trabalho.
2.3 INVERSOR DE FREQUÊNCIA TRIFÁSICO
Os inversores são circuitos estáticos (não contêm partes móveis) que convertem potência DC em AC com a frequência e tensão de saída desejadas (AHMED, 2000). A tensão DC que alimenta os inversores geralmente é obtida através da retificação e filtragem da tensão alternada da rede elétrica. Os retificadores empregados podem ser controlados ou não de acordo com a aplicação (MOHAN; UNDELAND e ROBBINS, 1995).
As formas de onda na saída de um inversor deveriam ser idealmente senoidais. Entretanto, na prática as formas de onda são não-senoidais e apresentam determinado conteúdo harmônico. Para diversas aplicações, a distorção harmônica pode ser aceitável, já para outras, é necessário a utilização de filtros (RASHID, 1999).
Atualmente existem diversas aplicações para os inversores de frequência incluindo transmissão de energia em corrente contínua, fontes ininterruptas de energia, fontes de alimentação para aeronaves, composição da interface elétrica na geração distribuída e controle de máquinas de indução (AHMED, 2000). Este último sendo o foco deste trabalho.
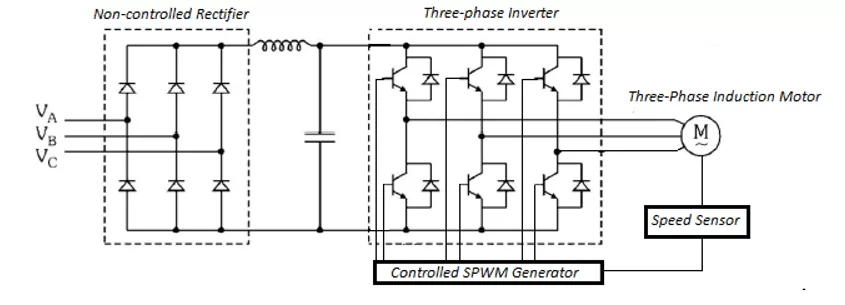
Na Figura 5, é apresentado o diagrama contendo a forma geral de um controle de velocidade de um motor trifásico que será utilizado nas simulações.
Figura 5 – Diagrama elétrico de um circuito inversor aplicado ao controle escalar de motor de indução
3. DESENVOLVIMENTO
3.1 RESUMO DAS CONSIDERAÇÕES INICIAIS DO PROJETO DO INVERSOR
Com base no que foi demonstrado nas seções anteriores, é apresentado o Quadro 1 contendo o resumo das considerações iniciais do projeto.
Quadro 1 – Resumo das considerações de projeto
| Controle da amplitude da tensão de linha na saída do inversor. | · O controle será através do índice de modulação (ma) variando entre 0 e 1.
· A tensão contínua será definida no valor de 359.47 V. |
| Controle da frequência da fundamental na saída do inversor. | · Será controlada através da frequência da onda senoidal de referência. |
| Frequência de chaveamento. | · Será definida em 5100 Hz. |
| Relação V/F | · A relação V/F será mantida constante durante todo o controle.
· A frequência da saída do inversor irá variar de 40 à 60 Hz. |
Fonte: Do próprio autor.
3.2 CONTROLE V/F EM MALHA ABERTA
Foi desenvolvido o algoritmo de disparo das chaves do inversor utilizando a técnica SPWM e foi implementado no software PSIM através da ferramenta C-Block (plataforma de desenvolvimento em linguagem C do PSIM).
O controle V/F foi implementado em algoritmo de acordo com a função apresentada na Figura 2. Para obtenção da expressão matemática, foram utilizados os dois pontos conhecidos do gráfico: (0,0) e (60,220). Os valores mínimos de frequência e tensão foram fixados no ponto (40,147) da reta e o valor da tensão do barramento DC foi de 359.47 V.
Os parâmetros do motor de indução utilizado na simulação podem ser vistos no quadro a seguir:
Quadro 2 – Parâmetros do motor utilizado na simulação (valores referidos ao estator)
| Tensão nominal | 220 V |
| Potência nominal | 7.5 CV |
| Frequência nominal | 60 Hz |
| Velocidade síncrona nominal | 3600 rpm |
| Resistência e Indutância do estator | 0.294Ω e 1.39mH |
| Resistência e Indutância do rotor | 0.156Ω e 0.74mH |
| Indutância de magnetização | 41mH |
Fonte: Do próprio autor.
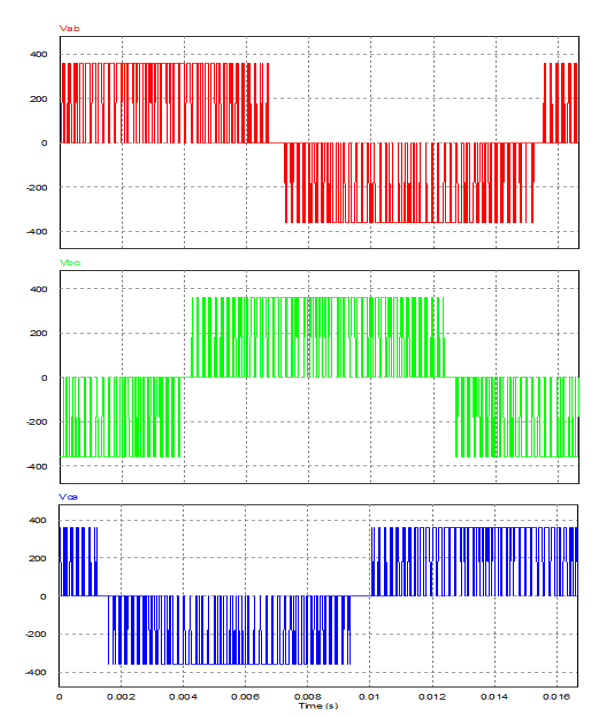
O circuito simulado pode ser visto na Figura 6, e as formas de onda das tensões de linha obtidas na saída do inversor podem ser vistas na Figura 7.
Figura 6 – Circuito simulado no PSIM
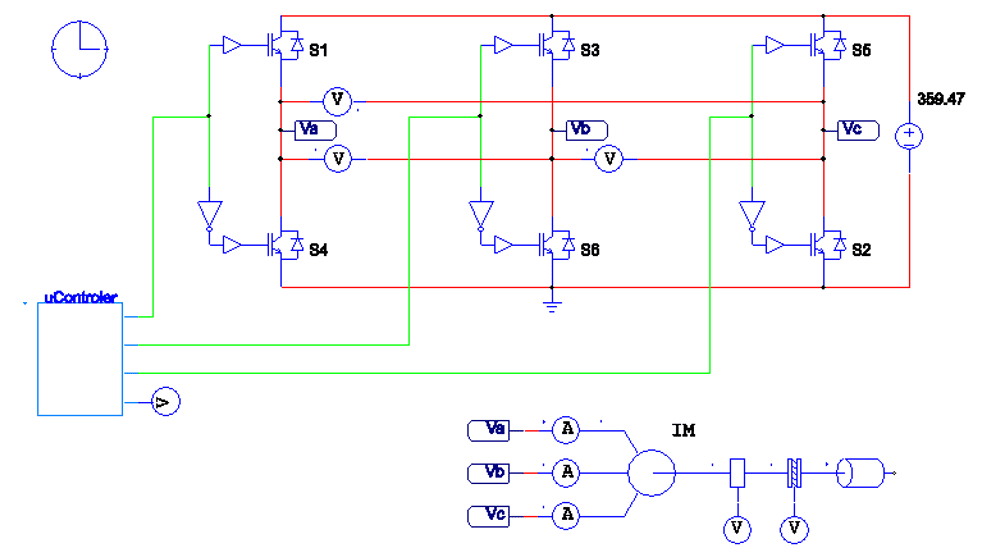
Figura 7 – Tensões de linha Vab, Vbc e Vca obtidas na saída do inversor com ma = 1 e mf = 85.
Como apresentado na fundamentação teórica, para a validação do algoritmo do controle V/F em malha aberta duas condições devem ser verificadas. A primeira delas está relacionada com a capacidade do controle de atingir o valor de referência da velocidade. A segunda corresponde à capacidade do controle em manter o torque máximo constante para diferentes valores de velocidades exercidas pelo motor.
Os gráficos da Figura 8 correspondem à velocidade em função do tempo. Os valores apresentados correspondem aos instantes em que o motor atinge 99% da velocidade síncrona (escorregamento de 1%).
Figura 8 – Curvas de velocidade em função do tempo para as referências de (a) 3600 rpm, (b) 3000 rpm, (c) 2700 rpm e (d) 2400 rpm.
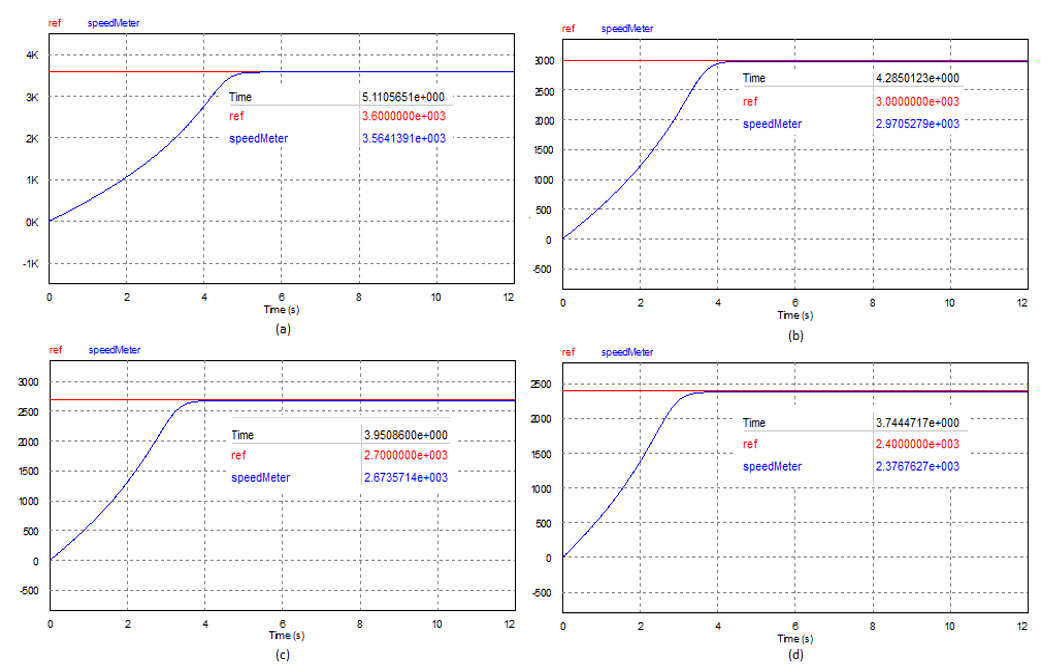
Observou-se que em todos os casos o motor atingiu a referência com escorregamento de aproximadamente 1%, demonstrando assim o correto funcionamento do controle da velocidade.
Com o intuito de comprovar a preservação do torque desenvolvido pelo motor, são apresentados na Figura 9, os gráficos de torque em função da velocidade para os mesmos valores de referência da Figura 8, destacando os valores do torque máximo e a velocidade em que eles ocorrem.
Figura 9 – Curvas de torque em função da velocidade para as referências de (a) 3600 rpm, (b) 3000 rpm, (c) 2700 rpm e (d) 2400 rpm.
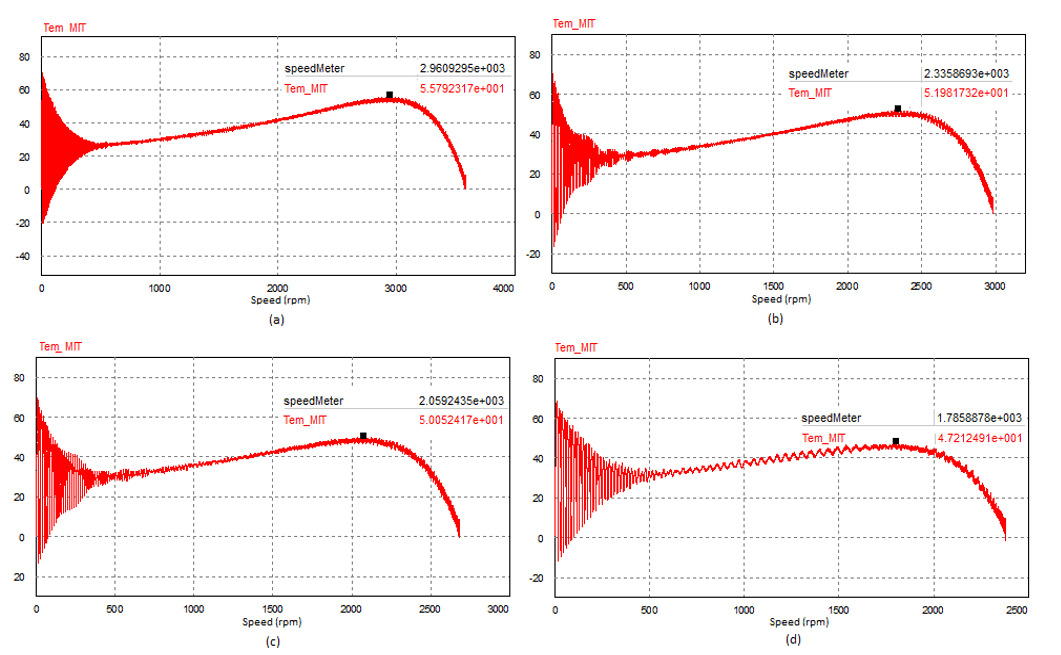
Com base na análise dos gráficos da Figura 9, é possível observar que o torque máximo desenvolvido pelo motor sofreu uma redução de 17% com a diminuição da velocidade de 3600 rpm para 2400 rpm. Tal redução pode ser explicada devido à resistência de estator.
3.3 CONTROLE V/F EM MALHA FECHADA
Como foi apresentado na seção anterior, o controle V/F em malha aberta apresentou um comportamento dentro do esperado com relação à capacidade de atingir a velocidade de referência e de manter o torque máximo desenvolvido para diferentes rotações. Como desvantagem, esta técnica de controle não apresenta a capacidade de eliminar perturbações na velocidade decorrentes de variações bruscas na carga no eixo do motor. Dessa forma, nessa seção é proposto um aprimoramento do controle V/F em malha aberta capaz de eliminar tais variações de velocidade através da realimentação e da utilização de um controlador PI, o denominado, controle V/F em malha fechada.
Na Figura 10, é apresentado um gráfico da velocidade em função do tempo de um sistema de controle em malha aberta, onde em aproximadamente 6.6 segundos (tempo em que o motor já opera em regime permanente), ocorre uma perturbação do tipo degrau na carga de 20 Nm de amplitude. O valor em destaque corresponde à velocidade após a perturbação.
Figura 10 – Perturbação degrau aplicada à um motor operando em malha aberta, destacando a redução de velocidade com o aumento do torque da carga.
Com o intuito de realizar o reajuste da velocidade em casos como o da Figura 10, foi feito o projeto de um controlador PI através da ferramenta Simulink do Matlab.
A primeira etapa do projeto consistiu na obtenção de uma função de transferência (FT) aproximada de primeiro grau determinada através do método da área (ASTRÖM e HÄGGLUND, 1995). Na Figura 11, é possível observar a aplicação do método da área através da curva de resposta obtida a partir da aplicação de um degrau de frequência com amplitude de 60 Hz.
Figura 11 – Aplicação do método da área para obtenção da função aproximada de primeiro grau.
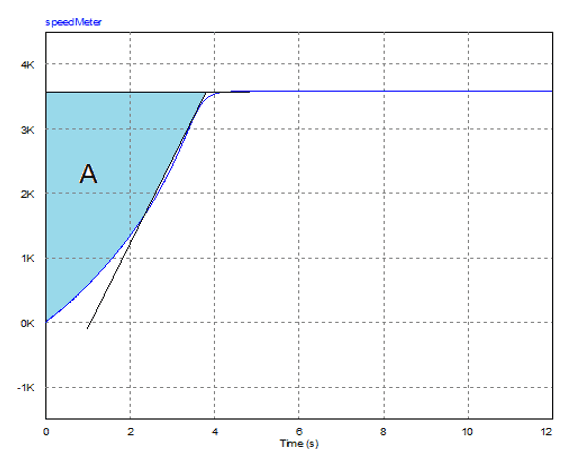
Os parâmetros obtidos para a FT podem ser vistos no Quadro 3.
Quadro 3 – Parâmetros da função de transferência de primeiro grau.
| K | 60 |
| T | 2.5 |
| Atraso | 1.2 s |
Fonte: Do próprio autor.
A FT resultante pode ser vista a seguir.

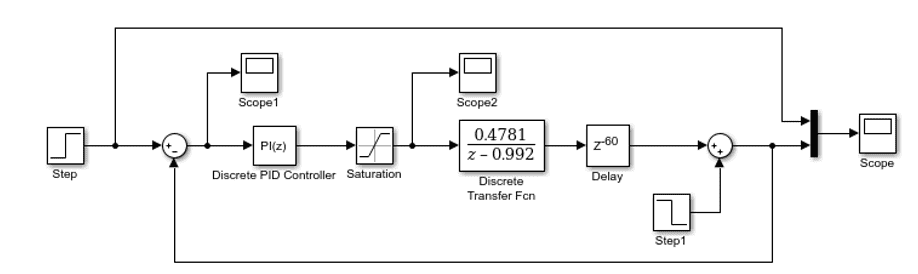
A FT da equação (4) foi discretizada utilizando o método do sustentador de ordem zero, e como resultado, obteve-se a seguinte função de transferência discreta.

Em posse da FT discreta da equação (5), foi montado o diagrama no software Simulink da Figura 12.
Figura 12 – Diagrama em blocos do sistema de controle em malha fechada montado no Simulink.
Os parâmetros do controlador PI foram obtidos através da ferramenta PID-Tuner do Simulink. Os valores podem ser encontrados no Quadro 4.
Quadro 4 – Parâmetros do controlador PI obtidos através do PID-Tuner.
| Kp | 0.01506 |
| Ki | 0.005866 |
Fonte: Do próprio autor.
O tempo de amostragem foi definido em 20ms.
É importante destacar, que como o controle V/F é, essencialmente, um controle em regime permanente (vide seção 2.2.1), não foram necessárias rigorosas preocupações com as características dinâmicas do sistema em malha fechada. Tomou-se cuidado, porém, em manter os valores dos tempos de subida e acomodação semelhantes aos valores da resposta natural do motor, e além disso, optou-se por uma resposta sem sobressinal.
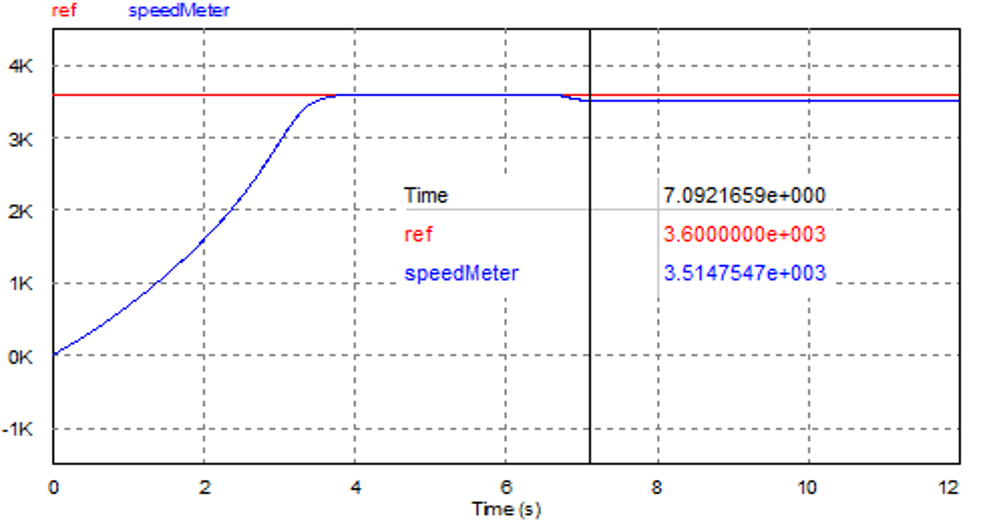
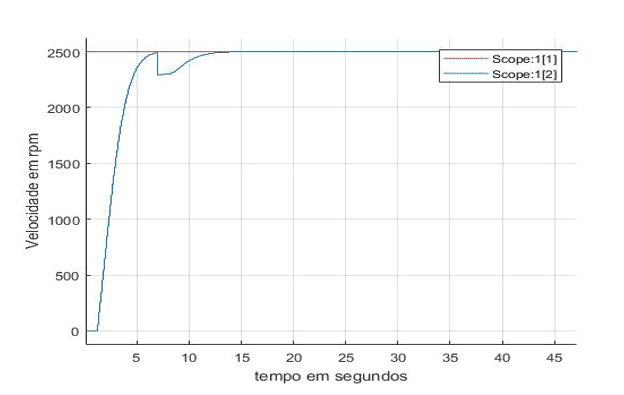
Para a validação do funcionamento do sistema de controle, foi realizada a simulação do diagrama da Figura 12. O bloco “Step1” foi utilizado para simular uma perturbação do tipo degrau na saída do sistema, o que na prática, corresponderia à uma variação de velocidade decorrente de uma mudança brusca no torque solicitado pela carga. A perturbação aplicada foi de -200 rpm, e ocorreu no instante de tempo de 7 segundos (momento em que o sistema já se encontra em regime permanente). A referência foi definida em 2500 rpm. O resultado obtido pode ser visto na Figura 13.
Figura 13 – Simulação da resposta do controle em malha fechada para uma referência de 2500 rpm e aplicando uma perturbação do tipo degrau de -200 rpm no instante de tempo de 7 segundos.
Após verificado o funcionamento do controle em malha fechada no Simulink, foi feita a conexão da realimentação e foi adicionado o algoritmo do controlador PI ao código desenvolvido na simulação do controle em malha aberta da seção anterior. O novo circuito simulado no PSIM pode ser visto na Figura 14.
Figura 14 – Circuito simulado no PSIM para realização do controle em malha fechada.
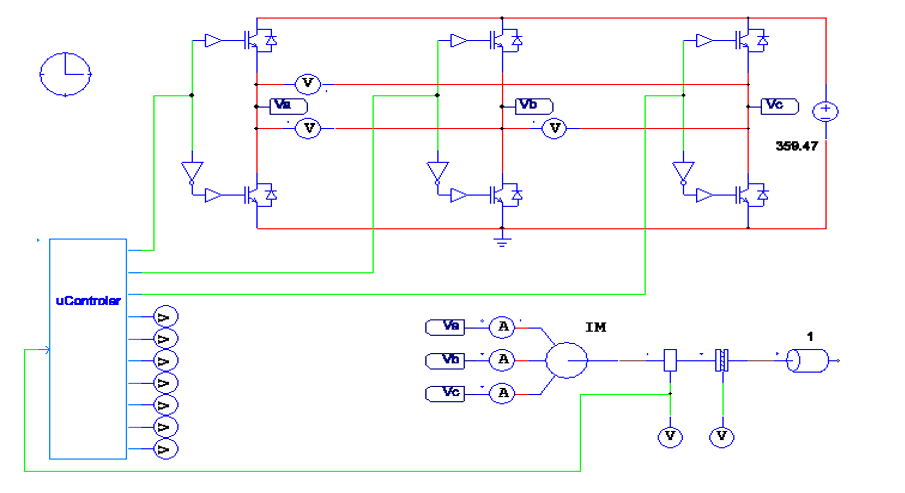
Observa-se que o circuito da Figura 14 é praticamente idêntico ao da Figura 6, diferindo apenas na presença da realimentação do sensor de velocidade.
Na Figura 15, são mostrados os resultados das simulações do controle em malha fechada do circuito da Figura 14 utilizando diferentes valores de degraus de torque na carga do motor. Os valores em destaque correspondem às mínimas velocidades atingidas devido à aplicação de cada perturbação.
Figura 15 – Resultados das simulações para diferentes valores de degraus torque (a) 8 Nm, (b) 12 Nm, (c) 20 Nm, (d) 30 Nm.
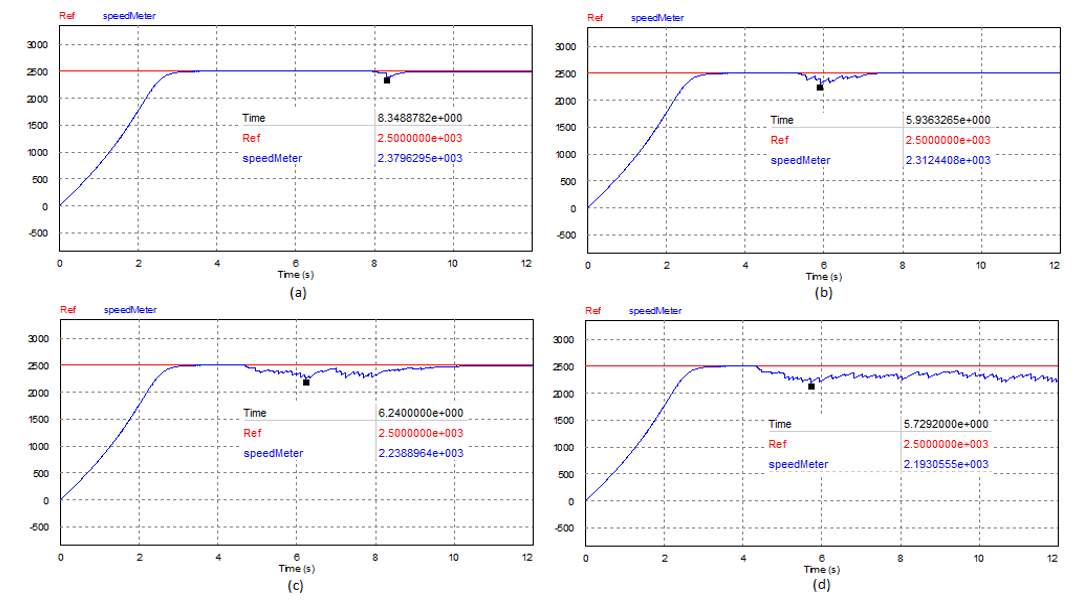
Pela análise da Figura 15, é possível observar, que para os degraus de torque de 8, 12 e 20 Nm, o controlador conseguiu recuperar a velocidade de referência. Para o caso do degrau de 30 Nm, é possível verificar que o controle não conseguiu recuperar a referência dentro de um tempo mínimo aceitável. Sendo assim, as simulações da Figura 15 comprovam o funcionamento do controle em malha fechada considerando variações abruptas de carga de até 20 Nm.
3.4 PARTIDA EM RAMPA
Nesta seção, propõe-se o desenvolvimento de um algoritmo de partida em rampa e a verificação dos efeitos obtidos na corrente do motor.
Na Figura 16, é apresentado o comportamento da corrente do motor durante uma partida à tensão nominal. Destaca-se o valor e o instante da corrente máxima.
Figura 16 – Corrente desenvolvida no motor para uma partida com tensão nominal.
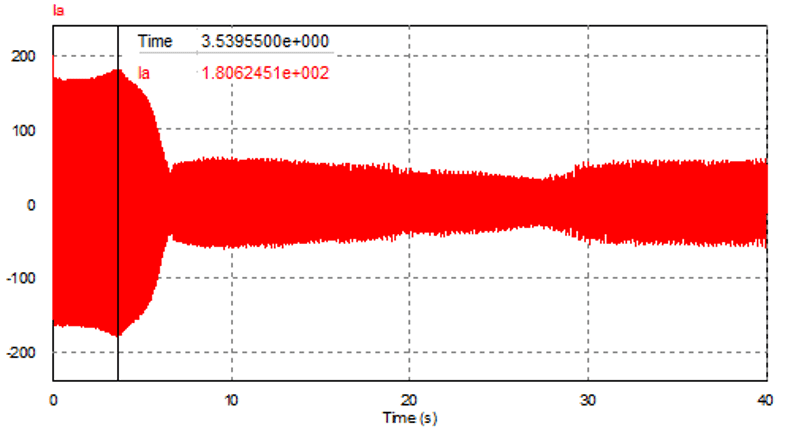
De acordo com o gráfico apresentado na Figura 16, é possível observar que o valor máximo da corrente na fase A durante a partida é de 180,62 A-p (ou 127,71 A-rms).
A rampa de tensão implementada via algoritmo foi gerada de acordo com a seguinte função do primeiro grau.

Onde,
α é o ângulo de crescimento da tensão (coeficiente angular).
Vi é a tensão aplicada no instante inicial da rampa.
Na Figura 17, são apresentados dois exemplos de rampas de tensão e os respectivos efeitos ocorridos na corrente e no tempo de partida. Também são destacados os valores e os instantes das correntes máximas.
Figura 17 – Gráficos da tensão, da velocidade e da corrente em função do tempo para uma rampa de partida com (a) α = 8 e Vi = 120, (b) α = 2 e Vi = 100.
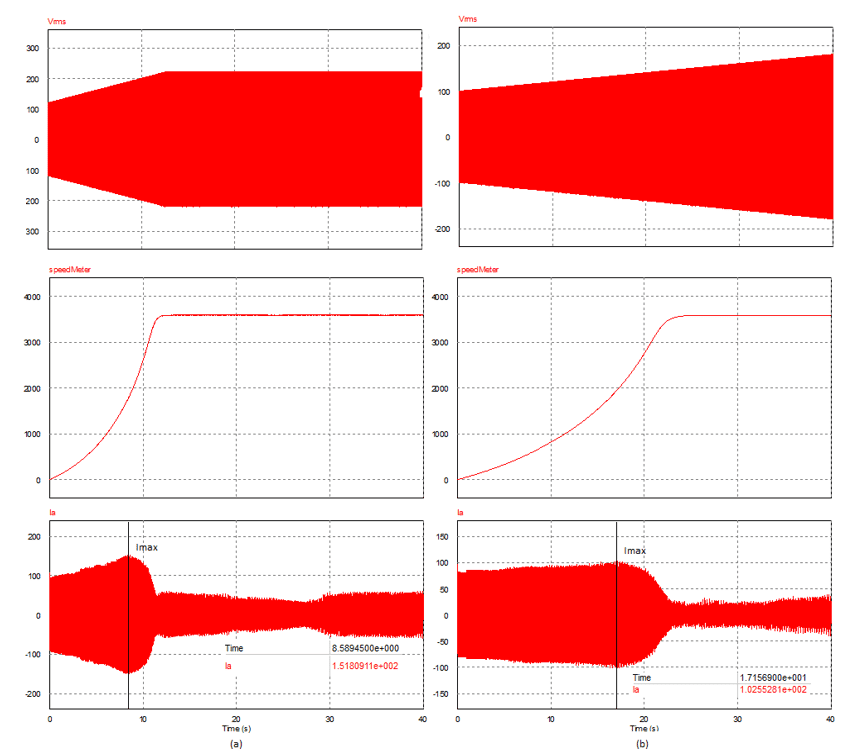
Pela Figura 17, é possível observar, que quanto menor o valor de α, a tensão cresce mais lentamente, e consequentemente, obtém-se uma maior redução na corrente de partida. Vale ressaltar, que o preço a ser pago pela diminuição na corrente é o aumento do tempo em que o motor leva para atingir a velocidade nominal. As simulações da Figura 17 comprovam o funcionamento do algoritmo de partida em rampa.
Destaca-se ainda, que no caso da Figura 17b, houve uma redução de 43% na corrente máxima de partida e com um tempo de aproximadamente 25 segundos para atingir a velocidade nominal. É importante destacar, que é possível ter reduções ainda maiores na corrente, porém deve se avaliar o aumento do tempo de partida de acordo com as exigências de cada aplicação.
4. ANÁLISE E DISCUSSÃO DOS RESULTADOS
A seção anterior apresentou as simulações de acionamento e controle de um motor de indução trifásico utilizando um inversor acionado pela técnica SPWM com tensão, frequência fundamental e frequência de chaveamento configuráveis.
Os resultados obtidos na simulação do algoritmo de controle V/F em malha aberta demonstraram uma excelente capacidade de atingir a referência de velocidade chegando a valores entre 99% e 99,5% da velocidade síncrona, o que na prática corresponde ao limite máximo imposto pelo escorregamento dos motores comerciais. Como esperado pela teoria, as quedas observadas no torque foram proporcionais à resistência de estator. Foram mensuradas perdas de 17% do torque máximo para reduções de 33% na velocidade do motor de estudo.
A proposta apresentada do controle V/F em malha fechada nada mais foi do que um aprimoramento do controle em malha aberta que apresenta a capacidade de eliminar variações na velocidade decorrentes de perturbações bruscas na carga. Como foi apresentado na fundamentação teórica, os motores de indução apresentam pouca sensibilidade à variação da carga, portanto o controle em malha fechada é justificado para aplicações onde a precisão da velocidade é um fator essencial para o processo. A Figura 15 demonstrou o funcionamento deste controle para variações de carga de 0 à 20 Nm, o que corresponde à uma excelente faixa de funcionamento principalmente ao levar em consideração o valor do torque máximo nominal desenvolvido pela máquina de 55,79 Nm (vide Figura 9a). Em outras palavras, o controlador conseguiu corrigir a velocidade satisfatoriamente para variações de carga de até 35,8% do torque máximo da máquina.
O algoritmo proposto para a realização da partida em rampa, apresentou uma redução de 43,3% da corrente máxima de fase na partida com um aumento de aproximadamente 5 vezes no tempo nominal de partida (houve um acréscimo de 5,11 segundos para, aproximadamente, 25 segundos como pode ser visto nas Figuras 16 e 17). Esses dados apresentam um resultado importante: em aplicações onde os tempos de partida não são fatores essenciais, é possível aplicar o algoritmo de partida em rampa com o objetivo de reduzir significativamente os picos de corrente, e consequentemente, obter benefícios relacionados ao consumo de energia, quedas de tensão na rede durante acionamento de motores e vida útil das máquinas.
5. CONCLUSÃO
O maior ponto a ser destacado com relação às simulações realizadas, é a simplicidade e a capacidade de adaptação deste à qualquer linguagem e/ou plataforma, seja ela em ambiente de simulação ou ambiente prático e funcional. É possível observar ainda, que a geração de ondas de referência e portadora puramente numéricas, extingue a necessidade de utilização de qualquer sinal analógico externo na geração do SPWM, resultando em um algoritmo totalmente funcional e aplicável a praticamente qualquer equipamento comercial. É importante salientar que em qualquer estudo ou projeto de engenharia que tenha como objetivo final o desenvolvimento ou aprimoramento de uma técnica prática e funcional, a simplicidade e os custos de implementação sempre serão fatores primordiais na aceitação no mercado.
Ao comparar os resultados atingidos com o que foi proposto, é possível afirmar que este trabalho obteve êxito ao trazer uma alternativa simples e barata, que não necessita do conhecimento profundo das características dinâmicas do motor, e portanto pode ser usada para uma grande variedade de máquinas de indução.
O funcionamento do controle V/F foi comprovado através de simulações que se mostraram condizentes com o embasamento teórico apresentado, e como resultado final, obteve-se um algoritmo capaz de acionar, controlar e tornar mais eficiente a utilização dos motores de indução trifásicos.
As limitações da abordagem desenvolvida envolvem, principalmente, a ineficácia da técnica de controle utilizada em apresentar uma resposta dinâmica satisfatória, bem como, a incapacidade de controlar separadamente velocidade e torque.
REFERÊNCIAS
AHMED, ASHFAQ. Eletrônica de Potência. Tradução de Eduardo Vernes Mack. 1ª. ed. São Paulo: Prentice Hall, 2000.
ASTRÖM, KARL JOHAN; HÄGGLUND, TORE. PID Controllers Theory, Design, and Tuning. 2ª. ed. [S.l.]: Instrument Society of America, 1995.
BIM, EDSON. Máquinas Elétricas e Acionamento uma introdução. 2ª. ed. São Paulo: Elsevier, 2012.
FITZGERALD, ARTHUR ERNEST; KINGSLEY, CHARLES; UMANS, STEPHEN D. Electric Machinery. 6ª. ed. [S.l.]: McGraw-Hill, 2005.
FRANCHI, CLAITON MORO. Inversores de Frequência Teoria e Aplicações. 2ª. ed. São Paulo: Érica Ltda, 2013.
MOHAN, NED; UNDELAND, TORE M.; ROBBINS, WILLIAM P. Power Electronics Converters, Applications and Design. 2ª. ed. [S.l.]: John Wiley & Sons, Inc, 1995.
PINHEIRO, HÉLIO. Motores de Indução de CA. Instituto Federal de Ciência e Tecnologia do Rio Grande do Norte, Campus Mossoró. Notas de aula. Mossoró, p. 67. 2009.
POMÍLIO, JOSÉ ANTENOR. Eletrônica de Potência. Universidade Estadual de Campinas – Unicamp. Notas de aula. Campinas, p. 19. Cap 7. 2014.
RASHID, MUHAMMAD H. Eletrônica de Potência Circuitos, Dispositivos e Aplicações. Tradução de Carlos Alberto Favato. 1ª. ed. São Paulo: Makron Books, 1999.
SEN, PARESH CHANDRA. Principles of Eletric Machine and Power Electronics. 2ª. ed. Kingston: John Wiley & Sons, Inc, 1996.
SUETAKE, MARCELO; SILVA, IVAN NUNES DA; GOEDTEL, ALESSANDRO. Controlador Escalar Fuzzy V/F de Velocidade de Motores de Indução. Anais do VIII Simpósio Brasileiro de Automação Inteligente (Paper No. 30887 // 06 Páginas), 2007.
TORO, VINCENT DEL. Fundamentos de Máquinas Elétricas. Tradução de Onofre de Andrade Martins. 1ª. ed. Rio de Janeiro: LTC, 1994.
WEG. Motores de Indução Alimentados por Inversores de Frequência PWM. Guia técnico. Jaraguá do Sul, p. 35. 2016.
[1] Engenheiro Eletricista.
Enviado: Janeiro, 2021.
Aprovado: Janeiro, 2021.

3 respostas
É pedir demais saber como ficou seu esquema no C block ? Estou fazendo um estudo no mesmo seguimento, mas estou com extrema dificuldade nessa parte (meu Qi é muito baixo para coisas relacionadas a esse tipo de programação)
Muito instrutivo o artigo. É uma boa solução para otimizar os processos industriais que utilizam motores trifasicos de indução.
Olá, excelente trabalho, estou fazendo algo parecido, será que poderia compartilhar o código C do controle em malha aberta?