MOREIRA, Josemar de Souza [1], SOUZA, Rodrigo de Castro e [2], BARATI, Gleisson Abreu [3]
MOREIRA, Josemar de Souza; et.al. Influência da Frequência Padrão de Rede no Funcionamento de Motores de Indução Trifásicos. Revista Científica Multidisciplinar Núcleo do Conhecimento. Edição 9. Ano 02, Vol. 03. pp 126-135, Dezembro de 2017. ISSN:2448-0959
Resumo
As máquinas elétricas são elementos que cumprem papel de grande importância nas indústrias. O presente artigo, apresenta as características elétricas de motores de indução trifásicos bobinados para 60 HZ quando ligados a uma rede de 50 HZ. O motor em estudo foi acionado por um inversor partindo a vazio e submetido às condições de 50% e 100% de carga, onde foram analisadas as seguintes características: Potência, Corrente, Velocidade nominal, Escorregamento, Eficiência e Torque. Os sinais de origem elétrica foram coletados nas três fases de alimentação do motor. Os resultados mostram-se dentro dos limites toleráveis.
Palavras-Chave: Inversores de Frequência, Motores de Indução, Torque, Corrente, Potência.
INTRODUÇÃO
Motores elétricos são máquinas capazes de promover uma transformação de energia elétrica em energia mecânica com algumas perdas de energia. Isto se deve principalmente à sua robustez, rendimento aceitável e baixo custo. Ainda com advento de sistemas de controle de velocidade e torque aplicados a este tipo de motor, é comum sua utilização em processos críticos ou de grande importância para a planta, área antes dominada por motores de corrente continua, Silva J. (2008).
No Brasil, de acordo com Ministério de Minas e Energia no documento “Plano Nacional de Eficiência Energética”, a indústria consome 43,7% de toda energia elétrica nacional e a força motriz em operação usa 68% desta parcela. Sendo assim, constata-se que aproximadamente 30% da energia elétrica do país é consumida por motores elétricos, ANEEL (2015). Diante da relevância e representatividade dos motores no consumo de energia elétrica, torna-se importante conhecer e monitorar as condições de funcionamento dos motores, afim de evitar eventuais problemas.
Com a industrialização, a proliferação de equipamentos eletrônicos é cada vez maior de forma a rentabilizar processos e otimizar lucros, levando a indústria a se preocupar cada vez mais com os parâmetros de qualidade de energia, Gonçalves (2008).
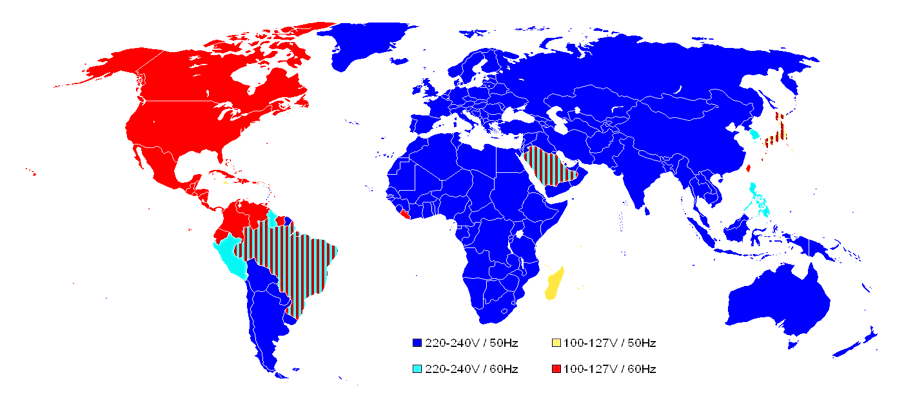
Nesse contexto, em um cenário onde é comum a importação e exportação de maquinas elétricas, torna-se de fundamental importância conhecer os padrões elétricos de tensão e frequência da rede a qual os motores elétricos serão ligados, afim de garantir o funcionamento adequado dos mesmos. De acordo com Neves (2014) e estudos realizados pela Companhia Estadual de Energia Elétrica (CEEE), existem diferentes padrões de tensão e frequência para cada país.
Segundo WEG (2010), os motores de indução trifásicos deverão operar com sucesso em condições de funcionamento à carga nominal e em tensão nominal com uma variação de frequência de até 5% acima ou abaixo da frequência nominal. O desempenho dentro desta variação não estará necessariamente de acordo com as normas estabelecidas para a operação na frequência nominal.
A motivação para esta pesquisa, vem da importância de conhecer e quantificar os efeitos que uma rede de 50 HZ causa sobre motores de indução trifásicos projetados para rede de 60 HZ, além de descobrir a real possibilidade de operação dos motores nestas condições. Fato que ocasionalmente pode ocorrer quando motores são instalados sem uso de dispositivos de eletrônica de potência em locais onde o padrão de frequência da rede é de 50HZ.
O motor em estudo foi acionado por um inversor de frequência a 60 HZ e 50 HZ respectivamente, partindo a vazio e submetido à condição de plena carga, onde foram analisadas as seguintes características: Potência, corrente, velocidade nominal, escorregamento, eficiência e torque.
QUALIDADE DA ENERGIA ELÉTRICA
O conceito de Qualidade de Energia está relacionado a um conjunto de alterações que podem ocorrer no sistema elétrico. Define-se bem o problema de qualidade de energia como sendo “Qualquer problema de energia manifestado na tensão, corrente ou nas variações de frequência que resulte em falha ou má operação de equipamentos” Rezende (2013). Estas alterações ocorrem em várias partes do sistema de energia, seja nas instalações de consumidores ou no sistema supridor da concessionária.
VARIAÇÃO DE TENSÃO E FREQUÊNCIA
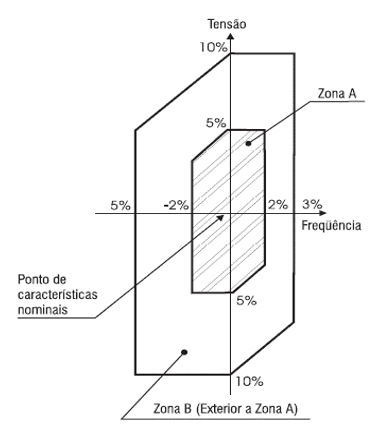
Entende-se por tensão e frequência nominais, a tensão e a frequência para o qual o motor foi projetado. Estudos realizados pela WEG (2012), mostram que existe uma tolerância à variação de tensão e frequência em motores de indução, conforme a norma NBR 17094:2013 que classifica a tolerância à variação de tensão e frequência em motores de indução como Zona A e Zona B, conforme mostrado na Figura 2.
De acordo com esta norma, um motor de indução trifásico deve operar com sucesso em condições de funcionamento à carga nominal na zona A, porém, pode não atender completamente suas características de desempenho, apresentando alguns desvios. Já na zona B o motor deve operar em condições de funcionamento à carga nominal mas pode apresentar desvios superiores aqueles da zona A. Dessa forma, recomenda-se evitar o funcionamento prolongado na periferia da zona B.
A WEG (2012) afirma que, motores trifásicos com enrolamento para 50 Hz poderão ser ligados também em rede de 60 Hz. Ligando motores de 50 Hz com a mesma tensão em 60 Hz, resulta nas características apresentadas a seguir.
- A potência do motor será a mesma.
- A corrente nominal é a mesma.
- A corrente de partida diminui em 17%.
- Cp/Cn diminui em 17%.
- Cm/Cn diminui em 17%.
- A velocidade nominal aumenta em 20%.
Porém, devem ser observados os valores de potência requeridos, para motores que acionam equipamentos de conjugados variáveis com a rotação.
FUNDAMENTAÇÃO TEÓRICA
Uma característica fundamental de um motor de indução é o comportamento do conjugado versus rotação. À plena carga, o motor de indução sempre irá girar a um escorregamento que segure o equilíbrio entre o torque eletromagnético desenvolvido pelo motor e o torque da carga.
Segundo Fitzgerald et al. (2003) uma carga mecânica requer uma determinada potência. Ou seja, quando o motor de indução aciona uma carga torna-se necessário que a característica mecânica do motor esteja adaptada as necessidades da carga mecânica.
Para um sistema dotado de movimento de rotação, a potência desenvolvida (P) é calculada pela Equação 1, onde C é o conjugado desenvolvido e w é a velocidade angular.
O torque eletromagnético do motor de indução pode ser obtido a partir do quociente da potência do eixo pela velocidade mecânica do rotor, dado pela Equação 2, onde Tem é o torque eletromagnético; Pout é a potência de saída (potência no eixo) e w é a velocidade mecânica do rotor.
Conforme a WEG (2012), a velocidade síncrona do motor é definida pela velocidade de rotação do campo girante, que depende do número de polos do motor e da frequência de alimentação. Os enrolamentos podem ser construídos com um ou mais pares de polos, que se distribuem alternadamente ao longo da periferia do núcleo magnético. Assim, como o enrolamento tem p polos, a velocidade síncrona é calculada através da Equação 3, onde Ns é a Velocidade síncrona (rpm), f é a frequência da rede (Hz) e P é o número de polos.
Em um motor elétrico assíncrono, o rotor sempre irá girar com rotação abaixo da rotação do campo girante. A diferença relativa entre as velocidades do rotor e do campo girante do estator é conhecida como “escorregamento” e é representada pela Equação 4, onde Ns é a velocidade síncrona (rpm); N é a velocidade rotórica (rpm) e S é o escorregamento.
A velocidade nominal, é a velocidade do motor à potência nominal, sob tensão e frequência nominais. Esta velocidade depende do escorregamento e da velocidade síncrona e é dada pela Equação 5.
O motor elétrico absorve energia elétrica da linha e a transforma em energia mecânica disponível no eixo. O rendimento define a eficiência com que é feita esta transformação. Chamado potência útil (Pu), a potência mecânica disponível no eixo e, potência absorvida (Pa), a potência elétrica que o motor retira da rede, o rendimento será a relação entre as duas, ou seja, Equação 6, onde Pu é a Potência útil (W) e Pa é a Potência absorvida (W).
A corrente nominal de um motor trifásico é a corrente absorvida da rede quando o motor funciona à potência nominal, sob tensão e frequência nominais. O valor da corrente nominal depende do rendimento (h) e do fator de potência (cosj) do motor. A corrente nominal é obtida através da Equação 7, onde In é a corrente nominal (A); P é a Potência (W); h é o rendimento e cos(α) é o fator de potência.
METODOLOGIA
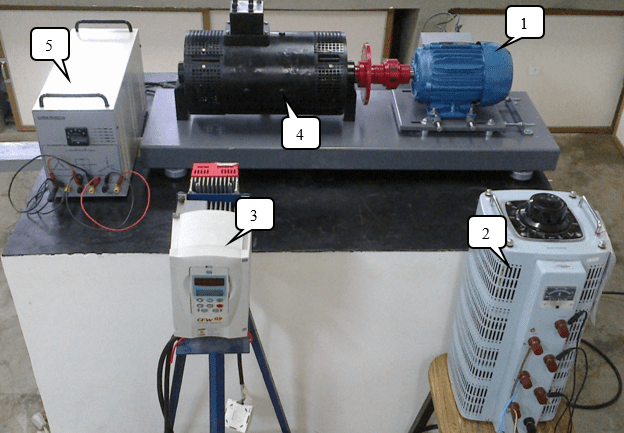
Os testes foram desenvolvidos em uma bancada didática mostrada na Figura 3. A bancada é composta por um motor de indução trifásico [1], WEG, 2 CV, 1750 rpm, 220V, 60 Hz, 4 polos, categoria N, 5,98 A, rendimento 84,2%, rolamentos SKF 6204 ZZ e SKF 6205 ZZ. Para a alimentação do sistema foi utilizado o Varivolt trifásico [2] e o inversor de frequência WEG CFW 09 [3].
O sistema de carga é composto por um motor CC funcionando como gerador de corrente contínua [4] MOTRON M610-VIRB-2K, 0,5 CV, 2000 rpm, alimentado por um gerador monofásico CC ligado aos terminais de campo, assim a carga foi aplicada no motor através do ajuste da corrente de campo do gerador CC. Já os terminais de armadura foram ligados a um banco de resistores [5].
O inversor de frequência foi parametrizado inserindo-se os dados de placa do motor e selecionando o controle escalar V/F 60 HZ e V/F 50 HZ. As coletas dos sinais elétricos foram feitas utilizando alicates amperímetro e conectores tipo jacaré, ambos os sensores integram o equipamento Baker Explorer 3000, Figura 4, tecnologia desenvolvida para monitoramento de equipamentos em operação on-line.

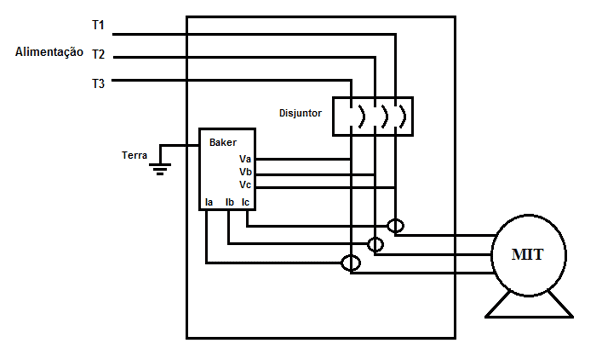
Com a ligação dos alicates amperímetro e cabos de tensão tipo jacaré às três fases, os sinais foram processados e memorizados, possibilitando a analise através do próprio equipamento. O esquema de ligação do equipamento Baker Explorer 3000 é mostrado na Figura 5.
APRESENTAÇÃO DOS RESULTADOS
Na Tabela 1, tem-se os dados obtidos através do analisador de motores Baker Explorer, relacionando os valores de potência, corrente, velocidade, torque, eficiência e escorregamento.
Tabela 1 – Parâmetros elétricos do motor.
| PARÂMETROS ELÉTRICOS | ||||
| ANÁLISE DO MIT EM 60HZ | ANÁLISE DO MIT EM 50HZ | |||
| CARGA DO MOTOR | 50% | 100% | 50% | 100% |
| POTÊNCIA (W) | 750 | 1493,33 | 747,4 | 1490,01 |
| CORRENTE (A) | 3,49 | 5,31 | 4,54 | 5,64 |
| VELOCIDADE (RPM) | 1774,95 | 1741,32 | 1486,93 | 1467,95 |
| TORQUE (N.m) | 4,03 | 8,20 | 4,72 | 9,17 |
| EFICIENCIA (%) | 94,35 | 93,45 | 93,33 | 93,19 |
| ESCORREGAMENTO | 0,014 | 0,033 | 0,009 | 0,021 |
Ao analisar os dados da Tabela 1, percebe-se que em termos práticos a potência consumida se manteve, pois, a carga simulada nos testes é caracterizada por torque constante. Houve uma redução na velocidade de operação do motor já esperada, de acordo com a equação 3, a velocidade síncrona do motor é definida pela velocidade de rotação do campo girante que tem relação direta com a frequência de alimentação. Houve um aumento da corrente para as condições de funcionamento em 50 HZ, porém a mesma manteve-se abaixo da corrente nominal do motor. Também houve aumento do torque para as cargas simuladas em 50 HZ, pois, conforme a Equação 2, com a redução da velocidade nominal a razão entre a potência de saída e a velocidade nominal aumenta. O torque a plena carga em 50 HZ aumentou aproximadamente 12% em relação a plena carga em 60 HZ. A eficiência do motor acionado em 50 HZ foi praticamente a mesma à 60 HZ.
Houve uma redução do escorregamento para ambas as condições de carga, nas diferentes frequências de alimentação. Como velocidade do campo girante do estator é menor, sua diferença em relação a velocidade do rotor também se torna menor.
CONCLUSÃO
Diante dos testes e das analise realizadas no motor sobre as condições de funcionamento em 60 HZ e 50 Hz, pode-se concluir que os resultados obtidos condizem com a teoria estudada sobre variação da frequência de alimentação em motores de indução trifásico, quando observa-se que há redução da velocidade com a redução da frequência, aumento do torque devido a redução da velocidade e redução do escorregamento.
As variações dos parâmetros elétricos, a princípio mostram-se dentro dos limites suportáveis pelo motor. Apesar disso, não é possível afirmar se haverá redução da vida útil bem como problemas associados ao desempenho de motores ao operarem permanentemente em redes de 50 HZ. Além disso, a condição de funcionamento em 50 HZ foi simulada com o uso de um inversor de frequência que não reproduz uma alimentação com frequência puramente senoidal.
REFERÊNCIAS
AGÊNCIA NACIONAL DE ENERGIA ELÉTRICA (Brasil) (ANEEL). “Incentivo à Substituição de Motores Elétricos: Promovendo A Eficiência Energética no Segmento de Força Motriz”. Brasília, 2015.
Associação Brasileira de Normas Técnicas. NBR 17094: Máquinas Elétricas Girantes – Motores de Indução – Parte 1:Trifásicos. Novembro de 2013.
Baker, I. C., 2013. User’s Manual EXP3000/EXP3000R. Baker Instrument Company. Avenue Suite 100 Fort Collins, CO 80525.
Fitzferald, A. E., Charles Jr. Kingsley & S.D. Umans (2003), Electric Machinery, 6ª edição, McGraw-Hill, New York.
Gonçalves, J. A. R. 2008. Estudo do Comportamento do Motor de Indução Trifásico Sujeito a Perturbações na Qualidade da Energia. Leiria: Faculdade de Engenharia Electrotécnica e de Computadores, Universidade de Trás-os-Montes e Alto Douro, 164p. Dissertação (Mestrado).
Neves, E. G. C. (2014). Padrões Elétricos de Tensão e Frequência. Centro de Engenharias, Universidade Federal de Pelotas. Setembro de 2014.
Rezende, P. H. O., 2013. Samesima, M. I., 2013. Efeitos do Desequilíbrio de Tensões de Suprimentos nos Motores de Indução.Horizonte Científico, v. 6, n. 2.
Silva, J. G. B., 2008.Aplicação da Análise de Componentes Principais (PCA) no Diagnóstico de Defeitos em Rolamentos através da Assinatura Elétrica de Motores de Indução. Universidade Federal de Itajubá. Tese (Doutorado).
WEG, S.A. Equipamentos Elétricos. Motores elétricos trifásicos: catálogo técnico. Jaraguá do Sul. 2010.
WEG, S.A. Motores elétricos: Guia de especificação.WEG, Jaraguá do Sul-SC, 2012.
[1] Bacharel em Engenharia Elétrica, Universidade Federal de São João del Rei – MG
[2] Bacharel em Engenharia Elétrica, Universidade Federal de São João del Rei – MG
[3] Graduando em Engenharia Elétrica, Universidade Federal de São João del Rei – MG

3 respostas
Saudações,
Achei muito interessante seu artigo sobre a influência de frequência em motores elétricos. Gostaria de saber se também foi analisado a temperatura do motor. Com aplicação de 50Hz pode haver aumento da temperatura? Como na conclusão a corrente e a potência pouco variaram, acredito que não haveria mudança significativa na temperatura.
Obrigado
Marcelo Bueno do Rosário
ola ,muito bom essa explicacao.
porem gostaria de saber sobre um motor de 200cv,890 rpm,com inverssor qual o rpm maximo permitida ou aconselhavel para o uso desse motor sem danificar componetes ou alterarcoes de potencia ou corrente?
Achei muito interessante e bem produzido.
Posso tomar a liberdade de pedir uma cópia em .pdf?
Grato