ARTIGO ORIGINAL
ANDRADE, Matheus César Dornelas [1], SILVA, Thiago Nunes [2]
ANDRADE, Matheus César Dornelas. SILVA, Thiago Nunes. Estudo e viabilidade de implantação do Arduino em praças de pedágios. Revista Científica Multidisciplinar Núcleo do Conhecimento. Ano 03, Ed. 10, Vol. 05, pp. 59-90 outubro de 2018. ISSN:2448-0959
RESUMO
O objetivo deste documento é comparar os componentes eletrônicos, bastante usados na automação, tanto na industrial, como na residencial, relacionando um microcontrolador que neste documento usamos o Arduino, e o Controlador Lógico Programado (CLP). Os dois sistemas têm aplicação em ambientes industriais e possuem características próprias as quais influenciam na decisão de qual será o mais adequado para a situação. Esses sistemas podem ser utilizados principalmente, em indústrias, residências, prédios comerciais entre outros.
Palavras-chave: Arduino, CLP, Comparação, Pedágio.
INTRODUÇÃO
De acordo com Vertulo (2018) os hardware e softwares para automação industrial têm como principal objetivo aumentar a eficiência de processos produtivos, reduzindo custos, maximizando a produção, diminuindo custos energéticos, reduzindo o desperdício de matérias primas, aumentando a segurança. Muito importante e utilizado no mundo de hoje, a diminuição dos componentes da tecnologia, nano-tecnologias, micro-tecnologias, ai que entra o Arduino por ser um micro-controlador.
É muito comum nas indústrias o CLP (Controlador lógico programável), que é baseado na linguagem de programação Ladder; como exemplo de CLP’s conhecidos pode-se citar os CLP’s da Siemens, WEG, entre outros. Não são equipamentos baratos, mas a disponibilidade de mão de obra qualificada e a facilidade de sua programação, muitas vezes justifica seus preços, pois o ganho de produtividade e a facilidade de manutenção destes equipamentos acaba equilibrando o custo/benefício. (1)
1.1 PROBLEMÁTICA
Segundo Silva (2012) a preocupação pelo aumento da produtividade iniciado pela Revolução Industrial exigia que as atividades produtivas melhorassem seus métodos de produção. Então surgiu a necessidade de padronização e mecanização das atividades fabris, incluindo a substituição de atividades repetitivas, antes executadas pelo homem, por máquinas. Costuma-se utilizar na automação industrial sistema de controle que são formados por um conjunto de elementos, tais como sensores, atuadores, e controladores e que têm como objetivo controlar um ou mais variáveis de um processo produtivo. As variáveis a serem controladas podem ser dos mais variados tipos e entre elas encontram-se o controle de vazão, pressão, pH, temperatura, densidade, nível, entre outras.
Sabendo que o custo/beneficio de um Arduino é bem inferior ao de um CLP, fica a questão: O Arduino é capaz de substituir um CLP dentro de uma praça de pedágio? E, se sim, o Arduino conseguiria apresentar os mesmos resultados que o CLP?
1.2 OBJETIVO GERAL
Esse projeto, tem como objetivo principal realizar um estudo sobre a viabilidade de implantação de Arduino em praças de pedágios, para a redução de custos na construção de uma praça de pedágio, mas priorizando também, a qualidade dos equipamentos para o bom funcionamento do projeto.
1.3 OBJETIVOS ESPECÍFICOS
- Comparar componentes eletrônicos
- Analisar viabilidade da implantação nos pedágios
- Decidir qual o melhor componente a ser instalado.
1.4 JUSTIFICATIVA
De acordo com Martins (2018) qual empresa não precisa de uma bela redução de custos? É claro que a crise não atinge a 100% das empresas brasileiras, mas mesmo aquelas que estão em ascensão no cenário economicamente desfavorável, encontram dificuldades para expandir seus negócios e obterem recursos para investimentos em estrutura e inovação. Atualmente, todas as empresas estão preocupadas com redução de custos, mas também beneficiando a qualidade e o bom funcionamento dos equipamentos , para não perder na qualidade. Sendo uma questão muito importante para os dias atuais a redução de custos, principalmente na construção de um pedágio , onde não está tendo entradas de capital.
2. ARDUINO
2.1 CONCEITO
Arduino é uma plataforma de prototipagem eletrônica de hardware livre e de placa única, projetada com um microcontrolador Atmel AVR com suporte de entrada/saída embutido, uma linguagem de programação padrão, a qual tem origem em Wiring , e é baseado em C/C++ (2).
Figura 1 – Placa prototipagem Arduino UNO
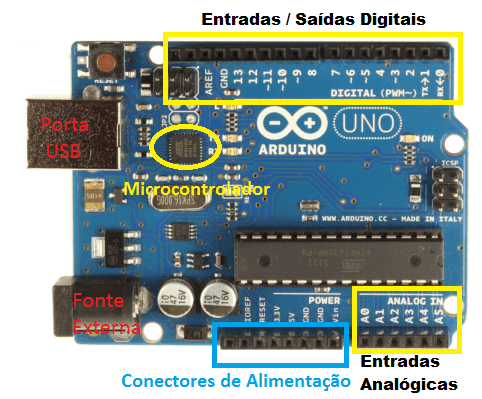
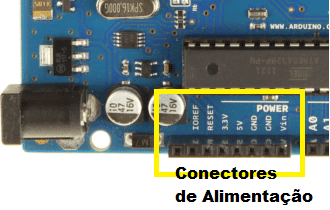
2.2 CONECTORES DE ALIMENTAÇÃO
- IOREF – Fornece uma tensão de referência para que shields possam selecionar o tipo de interface apropriada, dessa forma shields que funcionam com a placas Arduino que são alimentadas com 3.3V podem se adaptar para ser utilizadas em 5V, e vice-versa. (3)
- RESET – Pode ser utilizado para um reset externo da placa Arduino. (3)
- 3.3V – Fornece tensão de 3.3V para Shields e módulos externos , corrente máxima de 50mA. (3)
- 5V – Fornece tensão de 5V para alimentar Shields e circuitos externos.
- GND – Pino de referência , terra.
- VIN – Pino para alimentar a placa através de Shields ou bateria externa. Quando a placa é alimentada através do conector Jack , a tensão da fonte estará nesse pino. (3)
Figura 2 – Conectores de Alimentação
2.3 COMUNICAÇÃO USB DA PLACA ARDUINO UNO
Como interface USB para comunicação com o computador, há na placa um microcontrolador ATMEL ATMEGA16U2. (3)
Figura 3 – conversor USB-Serial com ATMega16uT
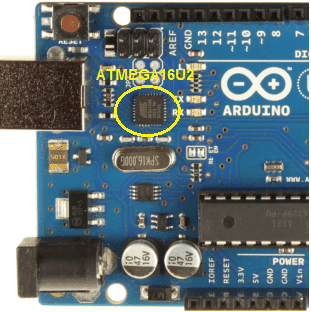
Este microcontrolador é o responsável pela forma transparente como funciona a placa Arduino UNO, possibilitando o upload do código binário gerado após a compilação do programa feito pelo usuário. Possui um conector ICSP para gravação de firmware através de um programador ATMEL, para atualizações futuras. Nesse microcontrolador também estão conectados dois leds (TX, RX), controlados pelo software do microcontrolador, que indicam o envio e recepção de dados da placa para o computador. Esse microcontrolador possui um cristal externo de 16 MHz.(3)
2.4 CÉREBRO DO ARDUINO
O componente principal do Arduino UNO é o microcontrolador ATMEL ATMEGA328, um dispositivo de 8 bits da família AVR com arquitetura RISC avançada e com encapsulamento DIP28. Ele conta com 32KB de flash (mas 512 Bytes são utilizados pro bootloader), 2KB de RAM e 1KB de EEPROM. Pode operar até 20MHz, porém na placa Arduino uno opera em 16MHz, o valor cristal externo que está conectado aos pinos 9 e 10 do microcontrolador. Ele possui 28 pinos , sendo 23 desses podem ser utilizados como I/O. (3)
Figura -4 Pinagem ATMega 328
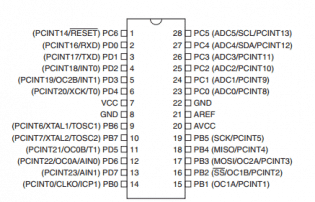
Esse microcontrolador pode operar com tensões bem baixas, de até 1,8 V, mas nessa tensão apenas opera até 4MHz. Possui dois modos de consumo super baixos, o Power-down Mode e o Power-save Mode, para que o sistema possa poupar energia em situações de espera. Possui, como periféricos uma USART que funciona a até 250kbps, uma SPI, que vai a até 5MHz, e uma I2C que pode operar até 400kHz. Conta com um comparador analógico interno ao CI e diversos timers, além de 6 PWMs. A corrente máxima por pino é de 40mA, mas a soma da corrente de todo o CI não pode ultrapassar 200mA. Ele possui um oscilador interno de 32kHz que pode ser utilizado, por exemplo, em situações de baixo consumo. (3)
3. CLP
Segundo a ABNT (Associação Brasileira de Normas Técnicas) IEC 61131 , o CLP é um equipamento eletrônico digital com hardware e software compatíveis com aplicações industriais. CLP é um dos controladores mais usados nas industrias.
Conceitualmente , CLP é um equipamento projetado para comandar e monitorar maquinas ou processos industriais. Mais a fundo é um computador especializado, baseado em um microprocessador que desempenha funções de controle através de softwares desenvolvidos pelo usuário.Ele entende a programação na linguagem de Ladder ou diagrama de blocos. Deve possuir um processador com software de controle e hardware que suporte operação em ambientes industriais. Este software, que é específico para automação e controle, possui um sistema operacional de tempo real, algo indispensável para controle de processos de alto risco como os que se encontram nas indústrias. Já o Hardware deve suportar as condições extremas de trocas temperatura, umidade, pressão entre outras situações as quais um computador padrão não suportaria. (4)
Este dispositivo nasceu dentro da General Motors em 1968, devido a grande dificuldade de mudar a lógica de controle de painéis de comando a cada mudança na linha de montagem. A sua grande vantagem era a reprogramação sem necessidade de realizar modificações de hardware, e com isso os tradicionais painéis de controles e relês foram sendo substituídos. Os CLPs permitiram transferir as modificações de hardware em modificações no softwares. (4)
Figura 5 – CLP WEG Clic 02

3.1 FUNCIONAMENTO
O principio fundamental de funcionamento de um CLP é a execução por parte da CPU (Unidade Central de Processamento) de um programa executivo, que realiza ciclicamente as ações de leitura das entradas, execução do programa do usuário e atualização das saídas. Ao ser ligado, um CLP cumpre uma rotina de inicialização gravada em um sistema operacional. Essa rotina realiza as seguintes tarefas : (4)
- Limpeza das memória-imagem
- Teste da memória RAM.
- Teste de executabilidade do programa.
Após este processo, a CPU passa a trabalhar continuamente scaneando o programa. Esse scan consiste em um ciclo executado várias vezes. São vários passos, onde checam o sistema e atualiza o contador interno, corrente e valores do timer. Os passos mais importantes são : (4)
- Verifica estado de entrada.
- Executa o programa.
- Atualizar estado das saídas
3.2 ENTRADAS
Dispositivos que introduzem informações ao CLP. Um dispositivo de entrada significa qualquer coisa que possa fornecer uma entrada para o Controlador Lógico Programável e influenciar a operação do programa, dispositivos inteligentes e até mesmo módulos de comunicação. (4) (5)
- Chave liga/desliga
- Botões/botoeiras.
- Sensores.
3.3 SAÍDAS
As saídas digitais são utilizadas para acionar atuadores como lâmpadas, contatoras, válvulas solenoide, motores, entre outros dispositivos, e podem ser encontradas basicamente em três tipos: (6)
- Saída por relé
- Saída por transistor
- Saída por tiristor
Os módulos de saída também podem ser do tipo digital ou analógico. Uma das boas razões para dizermos que os CLPs funcionam tão bem é porque eles são capazes de converter sinais. Assim se você possui uma tensão ou entrada de referência, mais cedo ou mais tarde você precisará de uma tensão ou corrente de saída. Assim o fluxo da informação funciona da seguinte forma: o cartão de entrada analógica converte o sinal para digital (conversão A/D). Após isso o programa processa a informação e envia para um cartão de saída analógica que converte o sinal digital em analógico (conversão D/A). Como você pode ver ocorre um processo reverso. (5)
3.4 – FONTE DE ALIMENTAÇÃO
Então, vamos começar com o rack que tem a função de fornecer uma montagem física para os I/Os bem como a conexão elétrica dos barramentos entre os módulos. O barramento se refere ao barramento de dados que estabelece um link de comunicação entre todos os módulos de I/O e o controlador. (5)
Figura 6 – Rack Série A da Mitsubichi com 8 slots de cartão

Ao observar a figura 6 pode-se imaginar que o rack não é grande coisa, mas ele é a espinha dorsal do CLP sendo responsável por interconectar todas as partes e permitir tanto a alimentação destas quanto a comunicação entre elas. (5)
Figura 7 – Modulo

Após encaixar o CPU no rack é necessário conectar os módulos de I/Os e comunicação de forma a compor o sistema necessário para as aplicações de controle e monitoramento. (5)
A fonte de energia no rack fornece alimentação em corrente contínua (geralmente 24V) para todos os módulos do rack sendo que as fontes mais populares possuem uma entrada universal AC podendo ser ligada tanto em 110V quanto em 220V que por sua vez é convertido em uma saída de 24V. Geralmente estas fontes de alimentação suprem somente a energia do CLP e dos módulos, sendo que caso sejam utilizados relês de saída nos painéis, pode ser que seja necessário redimensionar as fontes para alimentar todos os dispositivos. (5)
3.5 – CÉREBRO DO CLP
No interior da CPU é comum encontrarmos diversos tipos de processadores. Em CLP’s mais básicos e de pequeno porte, até os de médio porte, podemos encontrar microcontradores das famílias PIC e ARM Cortex M3 ou M4. Também é comum encontrarmos FPGA’s, já que estes podem operar com processadores softcore e possuem grande flexibilidade de programação e de hardware. Os CLP’s compactos são exemplos clássicos onde encontramos esses dispositivos. Já os CLP’s de grande porte utilizam processadores de alto desempenho como ARM Cortex A8 e A9 e recentemente o ARM Cortex A15 já está sendo utilizado. Para o futuro não será difícil encontrarmos os novos modelos Cortex A50 em aplicações industriais. Também encontramos processadores Power PC e o clássico padrão 8086 comercializado pela Intel e AMD. (6)
O sistema operacional do CLP deve ser robusto para evitar falhas nos processos a serem controlados. Entre os sistemas operacionais utilizados podemos encontrar o RTOS Vxworks, ThreadX, FreeRTOS, MicroC/OS-II e inclusive versões do Linux. (6)
Os fabricantes de CLPs oferecem diferentes tipos de CPUs e combinações baseado na complexidade requerida para cada aplicação. O CPU é composto por vários componentes como microprocessador, chip de memória, interface de I/O e outros circuitos integrados para controlar a lógica e monitorar a comunicação. Ele pode variar a velocidade de operação, sendo que a medida que a velocidade de processamento aumenta, o preço também aumenta proporcionalmente. O CPU por si só possui 4 modos de operação : (5)
- Modo de programação.
- Modo Run.
- Modo Stop.
- Modo Reset.
4. RFID
Sistemas de identificação são necessários no dia de hoje. O mais conhecido e consolidado talvez seja o código de barras, que é amplamente utilizado para as mais diversas aplicações: identificação de produtos, crachás de funcionários, validação de documentos bancários, gôndolas e caixas dos supermercados. (7)
Já com o RFID (Radio Frequency Identification), esta identificação é feita por rádio frequência, não precisando nem ter contato visual com o produto e muitas vezes possibilitando até a leitura dentro de suas próprias embalagens. São essas etiquetas que permitem o controle de produtos em lojas,, como é o caso daqueles sensores que ficam apitando na porta da loja quando o vendedor esquece de tirar a etiqueta da roupa que acabamos de comprar. (7)
4.1 O QUE É UM SISTEMA RFID ?
A identificação por rádio freqüência (RFID) vem sendo testada desde o início da década de 80 como uma alternativa a outros meios de identificação, como é o caso típico dos códigos de barras e o do QR Code.
As grandes vantagens de utilizar rádio frequência para este tipo de identificação são a possibilidade de fazer a leitura da informação sem a necessidade de contato e permitir a identificação de múltiplos objetos simultaneamente.
Além disto estas etiquetas têm a capacidade de carregar uma quantidade muito maior de informações a respeito do produto do que o código de barras ou mesmo um QR Code.
Mais um diferencial desta tecnologia é a possibilidade de ter um sistema de identificação que além de fazer a leitura de um dado, possibilita também gravar algumas informações na etiqueta RFID. Isto não é possível de fazer no código de barras em si, nem no QR Code, porque implicaria em ter que modificar o que está impresso. O que se faz, algumas vezes como uma medida paliativa, é alterar no banco de dados a informação associada àquele código, mas não se modifica o código em si. (7)
Esta característica, de permitir gravar e ler informações, cria a possibilidade de manter um histórico a respeito do deslocamento e modificações de um produto, o que é, por exemplo, excelente para o gerenciamento logístico de cargas, e que não se consegue fazer facilmente apenas com os códigos impressos. (7)
Um sistema completo de RFID é a integração de uma série de componentes que permite a identificação e o gerenciamento de objetos. A grande maioria dos sistemas RFID são compostos por pelo menos quatro itens básicos:
Etiqueta Eletrônica : Contém informação referente ao produto. Um circuito integrado interno a esta etiqueta irá carregar essas informações . Estas etiquetas costumam ser classificadas em três tipos:
Passivas: Não necessitam de alimentação interna. Sua energia vem do próprio sistema de leitura, através de indução magnética ou campo eletromagnético. Seu alcance típico dificilmente ultrapassa os 5 metros. São as mais comuns e amplamente utilizadas por um simples motivo: o custo
Semi-Passivas : Têm uma fonte de alimentação interna (bateria), apenas para a recepção de dados. Isso permite que sejam lidas sem a energia do leitor externo, fazendo-as serem capazes de trabalhar em ambientes com potência muito baixa de campo magnético. Isto reduz a quantidade de energia necessária para o sistema funcionar e também as interferências externas ao sistema. Como tem uma bateria interna, seu alcance pode chegar a 100 m. São mais caras e não são utilizadas em larga escala.
Ativas: Tem uma fonte de energia interna (bateria) e um transmissor. Alcance pode chegar a alguns quilômetros. São muito caras para produção em grande escala e utilizadas em sistemas específicos.
Leitor: conjunto de antenas que lêem e/ou gravam informações das etiquetas. Podem ser manuais (handhelds) ou fixos.
Servidor e softwares: fazem o armazenamento dos dados lidos e/ou gravados das etiquetas. Os softwares podem gerenciar as informações e emitir relatórios sobre os controles de estoques, produtos, indicar localização, etc.
Sistema de comunicação: faz a interligação entre os leitores e os servidores. Podem utilizar os meios tradicionais, como internet, rede, fibra ótica .(7)
4.2- FUNCIONAMENTO DO RFID
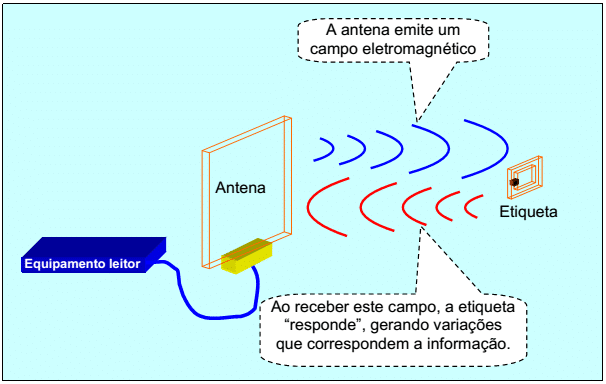
Basicamente o funcionamento de uma etiqueta RFID é conseguido através da indução de campos eletromagnéticos em circuitos ressonantes, muitas vezes chamados de transpônderes. Uma antena gera um campo eletromagnético e este excita um circuito ressonante LC, a respectiva antena da etiqueta RFID. Esta excitação por sua vez gera uma corrente que alimenta o circuito da etiqueta. O circuito gera a resposta para o leitor e a envia pela antena. As respostas deste circuito geram alterações no campo eletromagnético, que são medidas novamente pela antena. Estas alterações contêm um sinal modulado que carrega a informação da etiqueta. (7)
Figura 8 – Troca de informações entre antena e etiqueta RFID
Para que a etiqueta responda, é montado um circuito eletrônico.
Figura 9 – Diagrama de blocos de uma etiqueta eletrônica
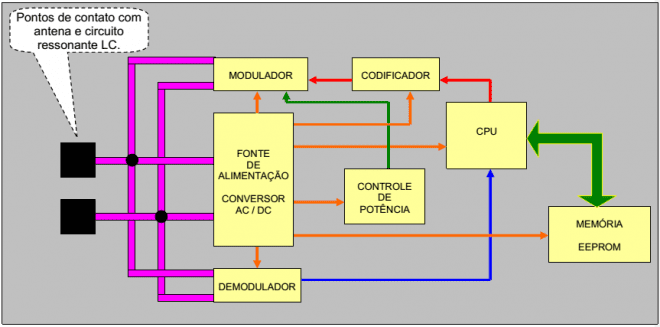
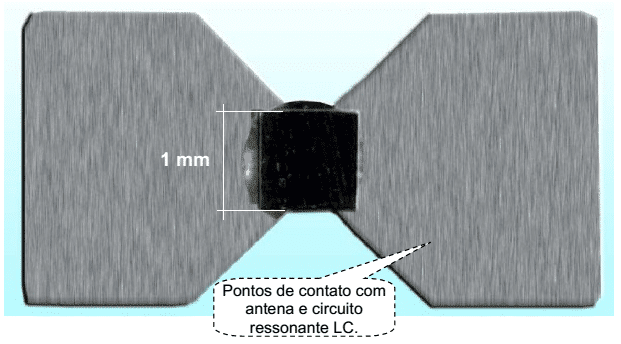
Este circuito é encapsulado e os pontos de contato são soldados na parte física da antena. A grande vantagem deste sistema é que mesmo para uma razoável quantidade de dados a memória necessária já atingiu um ótimo grau de miniaturização. Com isso, consegue-se encapsulamentos da ordem de 1mm² .
Figura 10 – Chip de uma etiqueta RFID
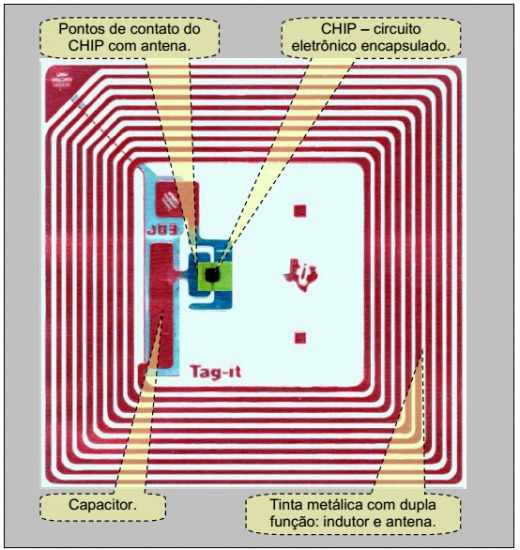
Finalmente esse chip é inserido na etiqueta.
Figura 11 – Etiqueta eletrônica RFID fabricada pela pela Texas Instruments
4.3- CAMPOS MAGNÉTICOS
Só é possível a existência das etiquetas RFID devido as propriedades dos campos eletromagnéticos. Das quatro Leis de Maxwell, a Lei de Faraday tem uma implicação direta com o funcionamento das etiquetas. Seu enunciado diz que:
“A tensão induzida em uma bobina por um campo magnético é proporcional a intensidade e a freqüência do campo induzido.” (7)
Figura 12 – Lei de Faraday
Desta lei é fácil concluir que quanto maior for a intensidade do campo magnético gerado pela antena (maior potência) melhor será a indução no indutor da etiqueta e melhor será a leitura dos dados. Porém isto tem um limite. Nas normas européias, por exemplo, potências maiores do que 0,5 w para transmissão dos sistemas RFID não são permitidas, o que limita a área de leitura das etiquetas. (7)
Por outro lado, um aumento na freqüência de operação também fará com que a tensão induzida na etiqueta seja maior. Isto implica que sistemas com maior freqüência de operação tendem a ter maior eficiência e alcance na transmissão de dados. (7)
Outro aspecto a ser considerado é o local onde a etiqueta será aplicada. Se aplicada sobre papel ou plástico (na capa de um livro, por exemplo), os campos magnéticos não sofrerão muita interferência. Agora se a superfície for metálica, distorções no campo eletromagnético acontecerão. Ambos os campos são afetados por metal. Porém as frequências maiores (UHF) tiram vantagens quando anexada a metal, coisa que as frequências mais baixas (LF e HF) não conseguem. (7)
Outro aspecto de campos eletromagnéticos que devem ser considerados são os campos próximos e distantes (near e far field).
Qualquer antena ao irradiar um sinal de RF gera campos eletromagnéticos ao seu redor, que é a composição do campo elétrico com o campo magnético. A intensidade destes campos varia de acordo com a distância da antena até o objeto receptor, em nosso caso a etiqueta. (7)
Quanto mais próximo da antena, maior as características magnéticas deste campo e menor as características elétricas do mesmo. (7)
5. MATERIAIS E MÉTODOS
Basicamente para automatização em praças de pedágios serão utilizados :
- Lâmpadas de LED : Será utilizado a luz verde , para indicar que o motorista está autorizado a prosseguir com sua viagem ; e será utilizado também a luz vermelha , para indicar que alguma coisa aconteceu de errado, que existe um problema.
- Cancela e Motor : O motor será utilizado para ser acionado quando o motorista efetuar o pagamento do pedágio, fazendo com que o motor gire, sendo assim , abrindo a cancela , e liberando a passagem para o motorista seguir a viagem.
- Câmeras : Para monitorar a praça de pedágio, e também , caso alguém queira tentar colar na traseira de um carro que está na fila do “Sem parar”, o sistema identifica o veiculo sem o sensor no vidro , e aí um sinal é enviado para a câmera , que fotografa a lateral e a traseira do carro. E, caso alguém queira ultrapassar a cobrança manual , a câmera fotografar a lateral e a traseira do veiculo.
- Leitor RFID : O leitor RFID será necessário para a cobrança automática, quando o veiculo com uma “Tag” colocada no vidro dianteiro do veiculo se aproximar do leitor RFID, o leitor fará a leitura da UID do chip transponder que estará no veiculo , e irá jogar esta UID através da antena de rádio frequência para o computador, que verificará se aquele UID está autorizado para prosseguir sua viagem.
- Sensor ultrassônico : Este sensor será colocado depois da cancela, quando este sensor pegar a movimentação do veiculo passando pela cancela, ele jogará um sinal para a cancela que o veiculo já passou , e que ela poderá ser fechada novamente.
- Relé : O relé é uma chave , e será necessário para fazer o acionamento do motor.
- Sensores ópticos : Estes sensores serão colocados no chão e na lateral das cabines de cobrança manual , que vão calcular quantos eixos os caminhões grandes possuem , quanto mais eixos mais caros será a cobrança. O valor da cobrança pelos eixos aparecerá de forma automática no computador do cobrador através deste sensor.
- Timer : Este timer será colocado, para marcar a data e o horário que o veiculo passou no pedágio, em cobrança automática.
- Arduino ou CLP: O Arduino ou CLP, será o cérebro de todo o processo automatizado , será ele que fará todo o controle, e irá acionar cada atuador, através dos sinais de sensores.
6. PROJETO COMPARATIVO
6.1.1 Facilidade de aprendizado
De acordo com Palmiere (2016) em termos de facilidade de aprendizado os CLP’s ganham dos microcontroladores, pois qualquer técnico pode programar um CLP, pela praticidade da linguagem ladder. O CLP exige que o estudante saiba interpretar comandos elétricos , lógica booleana, embora existem diferente modelos dos diversos fabricantes. Já para dominar um Arduino exige do estudante, estudo do seu sistema de hardware, uma linguagem de programação mais avançada, conhecimentos em softwares de simulação como Protheus, além de lógicas booleanas, algoritmos.
Neste quesito, vejo uma leve vantagem para o Arduino, pois , por ser um componente eletrônico mais complexo, e difícil aprendizado, não iria ser qualquer pessoa que iria programar, mas sim uma pessoa que entende.
6.1.2 – MERCADO DE TRABALHO
Segundo Palmiere (2016) Quanto ao mercado de trabalho, existem mais vagas na industria para pessoas com conhecimentos em CLP’s , mas se por um lado, nas industrias os programadores de CLP’s ganham vantagens, por outro lado os programadores de microcontroladores levam vantagens trabalhando por conta própria , tornando isso em até mesmo uma fonte de renda extra, estes programadores levam vantagens também , pois são obrigados a ter conhecimentos de hardwares. Ponto para o CLP.
6.1.3 – CREDIBILIDADE
Tanto o CLP, como o Arduino, tem boas credibilidade, mas, como o Arduino é uma plataforma de prototipagem eletrônica de hardware livre e de placa única, isso o faz com que qualquer pessoa possa fazer seu próprio Arduino, e no mercado existem diversos Arduino falsificados, que acaba não dando uma tão boa credibilidade para o dispositivo. Mais temos Arduino originais, e outras empresas de grande porte, como por exemplo a Intel, ela fabrica Arduino, e de excelência, hoje no mercado temos o Arduino Intel Galileo Gen. 2 , é uma das melhores linhas de Arduino no mercado atualmente, por ter um grande poder de processamento, memória, um ótimo clock, e o Arduino vai ganhando seu espaço hoje no mercado, e a confiança das pessoas, por ser muito utilizado já em automação residencial, automação em hotéis.
Já o CLP, temos grandes empresas que fabricam o CLP, grandes empresas também como a WEG, e a SIEMENS. Por isso há uma grande credibilidade e confiança nas indústrias, pelo o CLP. Por este quesito o CLP leva uma pequena vantagem, mas lembrando que, o Arduino vem crescendo no mercado.
6.1.4 – PREÇO
Neste quesito, o Arduino leva uma grande vantagem em cima do CLP, pois o preço de um Arduino pode variar , desde o modelo mais simples, à um modelo mais complexo.
O CLP, também pode variar de um modelo mais simples, e podendo chegar ao modelo mais complexo.
E a diferença de preços desses dispositivos é um dos quesitos principal, e mais importante, sendo que a diferença de preços do modelo mais simples com o modelo mais simples tem uma diferença um pouco “absurda”. O preço do Arduino é bastante inferior ao preço do CLP .
Então temos uma diferença de preço bem grande de ambos os produtos, que tenha basicamente a mesma finalidade, no final fazem a mesma coisa, que é automatizar processos. Por isso, ponto para o Arduino.
7.1.5- ROBUSTEZ
De acordo com Pinto, Verdelho e Santos (2012) robustez é uma área muito importante para o ramo industrial, pois hoje nas indústrias precisamos de aparelhos que suporte, umidade , elevadas temperaturas e baixas temperaturas. Neste quesito, o CLP leva vantagem, pois foi criado para suportar tudo que há numa industria , pois ele foi criado para o meio industrial. Já o Arduino, ele foi criado para estudos, e é mais usado hoje em dia em eletrônica,por isso ele não suportaria tais eventos, tendo alterações nos valores de saída. Mas, vai ganhando seu espaço no mercado.
6.1.6- LINGUAGEM DE PROGRAMAÇÃO
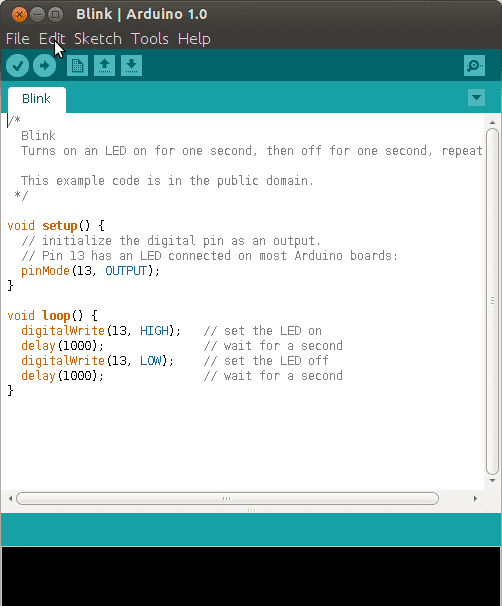
O Arduino é programado através da comunicação serial, pois o microcontrolador vem programado com o bootloader,dessa forma não é necessário de um programador pra fazer a gravação do binário na placa , a comunicação é feita através do protocolo STK500. (3)
O Arduino IDE é uma aplicação multiplataforma escrita em JAVA derivada dos projetos Processing e Wiring. É esquematizado para introduzir a programação a artistas não familiarizadas com o desenvolvimento de software, inclui um editor de códigos com recursos de realce de sintaxe, e identificação automática, sendo capaz de compilar e carregar programas para a placa com um único clique. Com isso não há necessidade de editar Makefiles ou rodar programas em ambientes de linha de comando. Tendo uma biblioteca chamada “Wiring”, ele possui a capacidade de programar em C/C++. Isto permite criar com facilidade muitas operações de entrada e saída, tendo que definir apenas duas funções no pedido para fazer um programa funcional. (23)
Void Setup() : Inserida no inicio, na qual pode ser usada para inicializar configuração.
Void Loop(): Chamada para repetir um bloco de comandos ou esperar até que seja desligada. (23)
Figura 13 – Exemplo linguagem de programação Arduino IDE
A linguagem Ladder é uma linguagem de baixo nível utilizado para programar CLP’s, capaz de realizar controles de sistemas críticos e/ou industriai, substituindo os antigos circuitos controladores relés que eram caros e de difícil manutenção, além de menos seguros. A principal vantagem de representar as lógicas de controle por meio de diagrama ladder é que permite a engenheiros e técnicos de campo desenvolver “códigos” sem conhecimento prévio de outras lógicas de programação como o FORTRAN ou o C. A programação de um CLP, na linguagem Ladder, ou diagrama de blocos, ela é uma programação mais simples, onde qualquer técnico em eletrotécnica, consegue programar o CLP. (9)
Um dos principais problemas apresentados pela linguagem ladder é a incompatibilidade entre CLP’s, mesmo entre modelos diferentes da mesma família. Embora a IEC 61131-3 tenha diminuído as diferenças mais marcantes entre CLP’s, transferir um código de um controlador para outro, pode ser um trabalho custoso. Devido ao fato de todos os processos do diagrama serem realizados pelo processador (CPU) do CLP de forma sequencial, é preciso de uma estrutura de Loop, que executa uma certa quantidade de vezes por segundo, fazendo com que o resultado na saída seja quase de imediato. (9)
A linguagem Ladder foi originalmente desenvolvida para construir e melhor documentar circuitos e relés, utilizados em processos de produção. Todos os dispositivos dos circuitos elétricos como botões, válvulas e solenóides podem ser representados em símbolos nos diagramas ladder, incluindo suas conexões. A verificação do código pode variar entre as marcas de CLP , mas é comum que a atualização seja feita da esquerda para a direita e de cima para baixo. (9)
Figura 14 – EXEMPLO DE PROGRAMAÇÃO EM DIAGRAMA LADDER
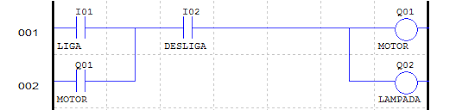
Por isso vejo uma leve vantagem para o arduino, por ser uma linguagem mais segura e mais dificil interpretação.
6.1.7 – PROTEÇÃO
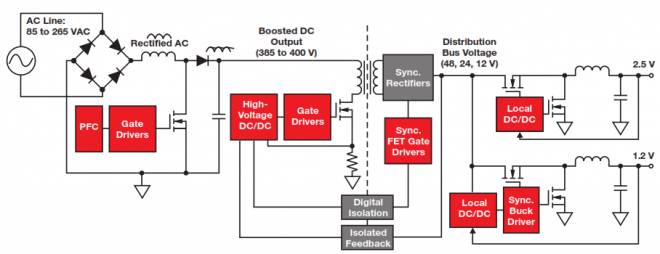
Os CLP’s trabalham com tensões continuas que vão de 3,3V a 24V, e necessita de uma fonte robusta e confiável que lhe forneça as tensões a níveis tolerados de ruído e oscilações. Geralmente as fontes dos CLP’s são alimentadas com tensão alternada entre 90V à 250V e devem ser protegidas contra curto-circuito e sobrecargas, proteção que podem ser feitas utilizando fusíveis de ação rápida ou disjuntores termomagnéticos devidamente dimensionados. É importante lembrar que a fonte do CLP deve estar separada da fonte das cargas do processo como sensores e atuadores. Estes não devem ser ligados a fonte do CLP por motivos de isolamento elétrico e limitações de potência, e assim deve possuir uma fonte de alimentação exclusiva. (6)
Figura 14 – Diagrama de Blocos de uma fonte chaveada
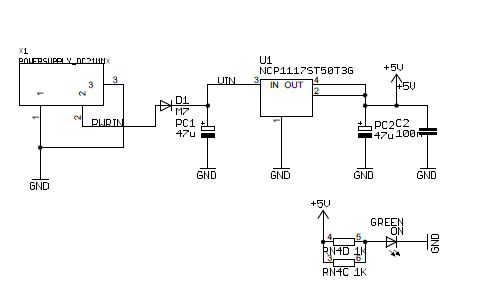
Já na Alimentação do Arduino, a alimentação externa é feita através do conector Jack com positivo no centro, onde o valor da tensão da fonte externa deve estar entre os limites 6V a 12V, porém, se alimentada com tensão abaixo de 7V a tensão de funcionamento da placa, que no Arduino UNO é de 5V, pode ficar instável e quando alimentada com tensão superior a 12V, o regulador de tensão da placa pode sobreaquecer e danificar a placa, dessa forma é recomendado para tensões de fonte externa entre valores de 7V a 12V.
O circuito regulador para entrada externa é exibido a seguir, nota-se que o CI responsável pela regulação de tensão é o NCP1117, da OnSemi. Destaque para o diodo D1 que protege o circuito caso uma fonte com tensão invertida for ligada. (3)
Figura – O Circuito regulador para a entrada externa
Quando o cabo USB é plugado a um PC por exemplo, a tensão não precisa ser estabilizada pelo regulador de tensão, dessa forma a placa é alimentada diretamente pela USB. O circuito da USB apresenta alguns componentes que protegem a porta USB do computador em caso de alguma anormalidade. Na figura abaixo é exibido o circuito de proteção da USB. (3)
Figura – Circuito de proteção da USB da placa Arduino
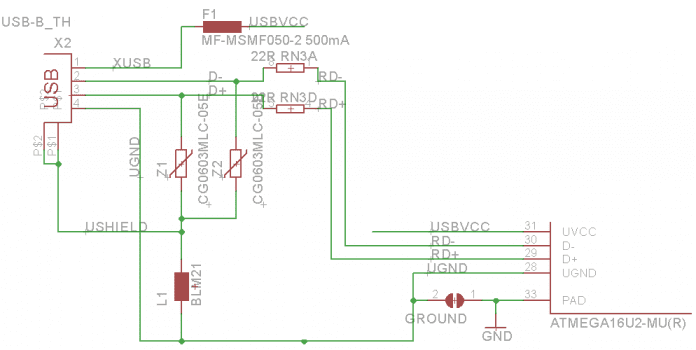
Os dois varistores (Z1 e Z2) podem suportar picos elevados de SURGE e energias elevadas de transientes, seria preferível se, ao invés de varistores, fossem conectados diodos supressores de ESD que tem capacitância bem baixa , já que estão ligados a pinos rápidos de comunicação, mas o circuito funciona bem mesmo assim. O resistor de 22Ohms (RN3A e RN3D) , limitam uma corrente resultante de alguma descarga elétrica eventual de um usuário em contato com o conector USB, resultante de transientes rápidos, protegendo, dessa forma, os pinos do microcontrolador. Podem ser usados para que também o fusível resetável (F1) de 500mA, impede que a porta USB do computador queime, caso ocorra algum problema de projeto ou uma falha no circuito e ultrapasse a corrente de 500mA, quando a placa estiver conectada ao PC, o ferrite L1 foi incluído no circuito para que ruídos da USB externa não entrem em contato no circuito da placa Arduino, através de seu terra. Além dos recursos apresentados anteriormente, a placa conta com um circuito pra comutar a alimentação automaticamente entre tensão da USB e a tensão da fonte externa. Caso haja uma tensão no conector DC e a USB é conectada , a tensão de 5V será proveniente da fonte externa e USB servirá apenas para a comunicação com o PC. (3)
Por isso necessário conhecimentos de eletrônica, pois se não tiver conhecimentos pode acabar danificando as cargas de saídas, como sensores e atuadores ligados no Arduino.
Neste critério o CLP acaba levando vantagem sobre o Arduino, por ter um sistema de proteção bem superior.
6.1.8 – ENTRADAS E SAÍDAS
Nesse quesito o Arduino leva uma pequena vantagem pois segundo o Souza (2013) Arduino UNO possui 14 pinos que podem ser usados como entrada ou saída digitais. Estes Pinos operam em 5 V, onde cada pino pode fornecer ou receber uma corrente máxima de 40mA. Cada pino possui resistor de pull-up interno que pode ser habilitado por software. Alguns desse pinos possuem funções especiais:
- PWM : 3,5,6,9,10 e 11 podem ser usados como saídas PWM de 8 bits através da função analogWrite() ;
- Comunicação serial : 0 e 1 podem ser utilizados para comunicação serial. Deve-se observar que estes pinos são ligados ao microcontrolador responsável pela comunicação USB com o PC;
- Interrupção externa : 2 e 3 . Estes pinos podem ser configurados para gera uma interrupção externa, através da função attachInterrupt() ;
E o Arduino não possui somente entradas digitais , ele também possui entradas analógicas , de acordo com Souza (2013) Para interface com o mundo analógico, a placa Arduino UNO possui 6 entradas, onde cada uma tem a resolução de 10 bits. Por padrão a referência do conversor AD está ligada internamente a 5V, ou seja, quando a entrada estiver com 5V o valor da conversão analógica digital será 1023. O valor da referência pode ser mudado através do pino AREF.
Já o CLP da clic 02 /12HR-D possui 6 entradas digitais, e 2 entradas analógicas, e 4 saídas relés,e não possui saídas PWM .
Por isso ponto para o Arduino, por possuir maior numero de entrada e saídas, ainda possui, saídas analógicas e PWM.
6.2.1- FUNCIONAMENTO CABINE DE COBRANÇA AUTOMÁTICA
O funcionamento das praças de pedágio de acordo com Motomura(2011) o sistema eletrônico “sem parar” lê o cartão de identificação no vidro do carro e libera automaticamente a passagem pelas cancelas das praças de pedágio. O processo leva segundos para se completar. A engenhoca registra data, horário, praça e o custo do pedágio. Depois, a cobrança da tarifa é enviada para a casa do cliente a cada mês, junto com a fatura do cartão de crédito.
O motorista terá que fazer um cadastramento do seu veiculo na praça de pedágio , ele irá “ganhar” um chip transponder , que terá uma UID especifica e cadastrada no sistema de banco de dados da praça de pedágio, e esse chip será colocado no vidro dianteiro do veiculo. Quando este veiculo estiver passando na cabine de cobrança automática , o leitor RFID vai conseguir fazer a leitura da UID do cliente cadastrada no sistema, e vai ser jogado um sinal para o LED de lâmpada verde acender, e também será lançado um sinal para a cancela abrir e neste exato momento o timer ira tirar um “print” da data e da hora em que o motorista estiver passando pela praça de pedágio e jogará os dados no bando de dados do sistema, para ser feita a cobrança necessária. E quando o motorista passar pela cancela, um sensor ultrassônico vai captar sua movimentação, e jogando um sinal para a cancela fechar.
6.2.2 – FUNCIONAMENTO CABINE DE COBRANÇA MANUAL
No funcionamento de cabine manual , é bastante simples, quando o veiculo se aproximar da cabine manual, o leitor óptico no chão e na lateral da pista fará a leitura, e irá verificar qual a categoria do veiculo que está na cabine, se é um automóvel , se é uma moto , se é um caminhão, e se for um caminhão quantos eixos o caminhão possui , logo apos a verificação de categoria , ele irá jogar o valor da categoria necessária no computador do cobrador, fazendo com que a caixa registradora se abre, quando o cliente fazer o pagamento ,o dinheiro será jogado por um túnel subterrâneo, e já irá cair dentro do cofre, e quando o caixa registrador se fechar, irá acionar a cancela, fazendo com que a cancela se abre para o motorista seguir a viagem, e logo em seguida, quando ele passar pela cancela, um sensor ultrassônico vai captar sua movimentação, e jogando um sinal para que a cancela se feche novamente.
7. CONSIDERAÇÕES FINAIS
Não obstante que, o Arduino além de ser um dispositivo eletrônico que vem crescendo muito atualmente, no ramo acadêmico, automação residencial, e por ter uma ótima qualidade de processamento, e de clock, um Arduino original, conseguiria sim, substituir o CLP dentro de uma praça de pedágio , trazendo os mesmos resultados esperados pelo CLP, e com um preço bastante inferior, comparado com um projeto de automação usando CLP.
Claro, com suas devidas manutenções necessárias e precavidas, para que nenhum mal funcionamento possa ocorrer.
REFERÊNCIA
1 VERTULO, Rodrigo. Laboratório de eletrônica. 2018. Disponível em: <http://labdeeletronica.com.br/automacao-industrial-e-arduino-e-possivel/>. Acesso em: 16 out. 2018.
2 ALMEIDA, Eduardo. Saiba mais sobre Arduino. 2014. Disponível em: <http://buildbot.com.br/blog/arduino/>. Acesso em: 13 set. 2018.
3 SOUZA, Fabio. Arduino UNO. 2013. Embarcados. Disponível em: <https://www.embarcados.com.br/arduino-uno/>. Acesso em: 16 mar. 2018.
4 FERREIRA, Aline Cristina da Silva et al. Controlador Lógico Programável. 2011. Curso de Engenharia de Produção da Faculdade Educacional de Araucária. Disponível em: <http://www.ebah.com.br/content/ABAAABnqMAJ/controlador-logico-programavel>. Acesso em: 16 mar. 2018.
5 SILVEIRA, Cristiano Bertulucci. Tudo sobre CLP. 2015. Citisystems. Disponível em: <https://www.citisystems.com.br/clp/>. Acesso em: 16 mar. 2018.
6 FREITAS, Carlos Márcio. (CLP) Controlador Lógico Programável. 2014. Disponível em: <https://www.embarcados.com.br/controlador-logico-programavel-clp-parte-2/>. Acesso em: 01 mar. 2018.
7 CUNHA, Alessandro. RFID- Etiquetas com eletrônica de ponta. 2016. Disponível em: <https://www.embarcados.com.br/rfid-etiquetas-com-eletronica-de-ponta/>. Acesso em: 21 jun. 2018.
8 INDUSTRIAL, Mecânica. Oque é um sensor ultrassônico. 2018. Disponível em: <https://www.mecanicaindustrial.com.br/598-o-que-e-um-sensor-ultrassonico/>. Acesso em: 21 jun. 2018.
9 SILVEIRA, Cristiano Bertulucci. Linguagem Ladder. 2010. Citisystems. Disponível em: <https://www.citisystems.com.br/linguagem-ladder/>. Acesso em: 12 fev. 2018.
10 ARDUINO . Arduino UNO. Disponível em: <https://datasheet.octopart.com/A000066-Arduino-datasheet-38879526.pdf>. Acesso em: 20 dez. 2017.
11 ARDUINO . Arduino . 2017. Disponível em: <https://store.arduino.cc/usa/arduino-uno-rev3>. Acesso em: 21 jan. 2018.
12 AYCOCK, Steve. A história dos microcontroladores. 2017. Disponível em: <http://www.ehow.com.br/historia-microcontroladores-info_42970/>. Acesso em: 10 fev. 2018.
13 BELVEDERE, Paulo. Arduino Uno: Fundamentos e aplicações. São Paulo: Senai-sp, 2017. 224 p. Disponível em: <https://books.google.com.br/books?id=ADxFDwAAQBAJ&printsec=frontcover&dq=arduino&hl=pt-BR&sa=X&ved=0ahUKEwj27qHY0pnaAhXFx5AKHW0dAVMQ6AEIKDAA#v=onepage&q&f=false>. Acesso em: 31 mar. 2018.
14 DIDACTIC . Esteira Transportadora. 2012. Disponível em: <http://www.joinville.ifsc.edu.br/~jlcurzel/CLP/4 – Kits Didáticos do Laboratório/ESTEIRA TRANSPORTADORA.PDF>. Acesso em: 01 abr. 2018.
15 FLOP, Filipe. Oque é Arduino. 2010. Filipe Flop. Disponível em: <https://www.filipeflop.com/blog/o-que-e-arduino>. Acesso em: 13 fev. 2018.
16 GOMBA, Davide. ARDUINO. 2011. Disponível em: <https://blog.arduino.cc/2011/01/05/nice-drawings-of-the-arduino-uno-and-mega-2560/>. Acesso em: 01 mar. 2018.
17 PETRUZELLA, Frank. Controlador Lógico Programável. 4. ed. New York: Amgh, 2014. 385 p. Revisão técnica de: Antonio Pertence. Disponível em: <https://books.google.com.br/books?id=hIo6AgAAQBAJ&pg=PA68&dq=CLP&hl=pt-BR&sa=X&ved=0ahUKEwi3sNLP05naAhXDlZAKHTxzAUUQ6AEISzAH#v=onepage&q=CLP&f=false>. Acesso em: 01 abr. 2018.
18 PINTO, Maria Inês; VERDELHO, Maria Inês; SANTOS, Tiago. Arduino vs PLC. 2012. Disponível em: <http://users.isr.ist.utl.pt/~jag/aulas/api11/docs/seminario_b1.pdf>. Acesso em: 16 out. 2018.
19 SILVA, Rafael Rodrigues da. História do CLP. 2012. Disponível em: <https://profrafaelrs.wordpress.com/2012/11/21/historia-do-clp/>. Acesso em: 27 dez. 2017.
20 MOTOMURA, Marina. Como funciona o pedágio. 2011. Disponível em: <https://super.abril.com.br/mundo-estranho/como-funciona-o-pedagio/>. Acesso em: 04 set. 2018.
21 MARTINS, Jander. Entenda a importância do planejamento para a redução de custos. 2018. Disponível em: <http://nexaas.com/blog/entenda-importancia-do-planejamento-para-reducao-de-custos/>. Acesso em: 16 out. 2018.
22 PALMIERE, Sérgio Eduardo. CLP versus microcontrolador. 2016. Disponível em: <https://www.embarcados.com.br/clp-versus-microcontrolador/>. Acesso em: 16 out. 2018.
23 ALMEIDA, Eduardo. Saiba mais sobre o arduino. 2014. Disponível em: <http://buildbot.com.br/blog/arduino/>. Acesso em: 16 out. 2018.
[1] Engenheiro eletricista- Faculdade Patos de Minas
[2] Engenheiro eletricista- Faculdade Patos de Minas
Enviado: Setembro, 2018
Aprovado: Outubro, 2018
