GOMES, Anderson Murilo de Almeida [1], TEIXEIRA, Niel Nascimento [2]
GOMES.Anderson Murilo de Almeida; TEIXEIRA, Niel Nascimento. Análise da Diferença de Precisão de Coordenadas e Área Obtidas por Receptores GPS/GNSS de Navegação e Geodésico, Para Fins de Medições de Custos em PRAD. Revista Científica Multidisciplinar Núcleo do Conhecimento. Edição 03. Ano 02, Vol. 01. pp 174-184, Junho de 2017. ISSN:2448-0959
RESUMO
O presente trabalho tem como objetivo a reabilitação das áreas degradadas para a elaboração e execução de um Programa de Recuperação de Áreas Degradadas pelas ações humanas, de modo a retorná-las em condições ambientais favoráveis para a regeneração, é necessário definir a área a ser recuperada, pois a depender da degradação esta área tem diferentes custos, sendo que, um erro de medição da área eleva os custos. Com a facilidade da utilização dos receptores do sistema GNSS, ainda mais dos receptores de navegação, os erros estão propícios para ocorrerem. Nesse sentido, é suma importância à utilização de instrumentos apropriados para esta finalidade, evitando erros que podem aumentar os custos de um PRAD. Este trabalho procura esclarecer as diferenças de precisões entre GPS de navegação e o geodésico, através de um levantamento de área realizado com os dois instrumentos. Sendo observado a relevância nas diferenças de áreas e dos custos atribuídos para a recuperação das áreas, através de valores por hectares. No entanto, foi realizado um levantamento de campo, com a finalidade de uma pesquisa a nível de conhecimento real para a coleta de dados provenientes do receptor GNSS Geodésico, no qual é efetivado uma série de procedimentos para processamento dos dados. Diante da pesquisa, a recomendação é que se use receptores geodésico, desse modo a área terá a precisão de centímetros.
Palavras-chaves: GPS, Geodésio, PRAD, Navegação.
INTRODUÇÃO
A humanidade desde os primórdios busca uma forma de marcação do local onde se habita, com vistas a sua posição geográfica e das características de poder sobre uma determinada área territorial. A procura em identificar a porção de área de controle, seja por questão de riqueza, por questões políticas e ou por objetivos de exploração, o homem sempre visou à demarcação de sua propriedade, do espaço sobre a terra (SILVA, 2002).
As limitações territoriais já foram orientadas por estruturas naturais como montanhas, rios, lagos, árvores de espécies que se destacavam sobre as demais, em seguida, eram demarcadas por cercas construídas perante medidas realizadas com cordas ou nos passos dos proprietários. Hoje a tecnologia permitiu um grande avanço no sistema de localização e de medição territorial, a cada instante o homem se localiza no globo terrestre, identificando qualquer ponto sobre a superfície e também na atmosfera, através de sinalizadores que se intercomunicam.
O avanço mais importante, entretanto, ocorreu com o advento Global Positioning System – GPS (Sistema de Posicionamento Global) e do Global Navegation Satellite System – GLONASS (Sistema de Navegação Global por Satélite) que vem revolucionando a área de levantamentos topográficos. Paralelamente ao desenvolvimento de nvos instrumentos, o aparecimento de programas aplicativos de Topografia e Geodésia, do Sistema de Informação Geográfica (SIG) e da Modelagem Digital de Terreno, vêm estabelecendo nova conduta na coleta, no tratamento dos dados e na apresentação dos resultados (SILVA & ERWES, 1996).
Segundo SILVA (2002), alguns países detentores de alta tecnologia eletrônica e espacial vêm desenvolvendo sistemas para localização de objetos na superfície terrestre. Estes objetos podem estar fixos ou em movimento (localização estática ou dinâmica), sendo neste caso conhecido como sistema de navegação, uma vez que, possibilita acompanhar, prever e estabelecer rotas de deslocamento ou de navegação. Dentre os principais países que desenvolvem seu próprio sistema, alguns para uso restrito em seu território e/ou parceiros de desenvolvimento, outros de uso aberto a todo globo, no qual, podemos citar a China, a Rússia e o Japão com seu sofisticado sistema de visualização em três dimensões, os Estados Unidos e um consórcio de países europeus. O sistema mais empregado no Brasil para uso civil e militar é o GNSS – Global Navigation Satellite Systems ou Sistemas Globais de Navegação por Satélite, que possuem dois sistemas de posicionamentos em plena operação: GPS e GLONASS.
Com a facilidade de utilização dos receptores do sistema GNSS, ainda mais dos receptores de navegação, muitos profissionais utilizam essa tecnologia para o levantamento de áreas, identificação de diversas estruturas, desenvolvimento de projetos, entre outras finalidades sem questionar sobre a finalidade de cada instrumento e limitações de precisão de cada atividade.
Além disso, SILVA (2002) acrescenta que o emprego indiscriminado destas tecnologias sem as devidas observações de critérios técnicos quanto aos limites de cada equipamento, tem levado a inúmeros erros em processos, pareceres e projetos, muitas vezes comprometendo o resultado final dos trabalhos desenvolvidos. E em casos de medições de atividades realizadas em determinadas áreas, as que são pagas em decorrência da evolução de metragem quadrada evoluída, pode ter grande divergência de valores.
Nas atividades de execução de programas de recuperação de áreas degradadas, Segundo Gripp & Nonato (1993), “a recuperação constitui o processo de reverter as terras degradadas pela mineração em terras produtivas e autossustentáveis”, e o art. 3º do Decreto 97.632/89 estabelece que “a recuperação deverá ter por objetivo o retorno do sítio degradado a uma forma de utilização de acordo com um plano preestabelecido para uso do solo, visando à obtenção de uma estabilidade do meio ambiente”, o valor pode variar de R$4.000,00 a R$ 400.000,00, conforme informado pelo professor Dr. Eduardo Pereira Cabral Gomes, pesquisador do instituto Botânica – SP, no Seminário de Técnicas de Recuperação de Áreas Degradadas na Chapada Diamantina de Gerais, realizado na Universidade Estadual da Bahia, Caetité -Ba, em outubro de 2016, para a recuperação de uma hectare, sendo o mapeamento uma ferramenta de suma importância para a identificação das áreas executadas e consequentemente do valor a ser pago pelo serviço.
Através dos recursos disponíveis atualmente é possível monitorar o uso e ocupação do solo e identificar os locais que se apresentam em desacordo com a legislação. Entre as vantagens da utilização dos SIG pode-se citar, redução dos trabalhos de campo, otimização no processamento de informações, maior eficiência no monitoramento e fiscalização de áreas sensíveis, confiabilidade de dados.
Desse modo, faz-se necessária a utilização de instrumentos e técnicas de levantamentos topográficos apropriados para esta finalidade, evitando realização de medições fora da realidade, o presente trabalho tem como objetivo analisar as diferenças de precisão das coordenadas obtidas por meio de levantamentos executados por receptores GPS/GNSS de navegação e geodésicos, aplicados em medições de custos em programas de recuperação de áreas degradadas.
RECEPTORES GPS DE NAVEGAÇÃO E GEODÉSICOS
De acordo com PENHA (2009), Os receptores GPS para levantamentos (geodésicos e topográficos) são equipamentos que diferem em pontos importantes dos receptores voltados à navegação. A princípio, todos os receptores GPS são geodésicos, no entanto, dependendo das precisões oferecidas pelos mesmos, são classificados em geodésicos, topográficos e de navegação, sendo que os receptores GPS geodésicos têm precisões milimétricas, os topográficos sub-métrica e os de navegação métrica. Enquanto os receptores Geodésicos e Topográficos armazenam suas observações de forma bruta, para posterior processamento, os de Navegação não fazem registro, além disso, não estão disponíveis funções como configurações de filtros de qualidade dos dados registrados, fazendo com que tenham poucos critérios para restringir resultados indesejados, por outro lado, os receptores Geodésicos e Topográficos são estruturados com as funções citadas delineando uma diferença fundamental entre os receptores.
Segundo Coelho (2000), o receptor de Navegação, nota‐se que a variabilidade para cada área dentro de cada declive é maior do que a observada com o receptor Geodésico; isso ocorre devido à existência de um erro de medição maior do que apresentado pelo receptor geodésico, para os mesmos pontos observados.
PROGRAMA DE RECUPERAÇÃO DE ÁREAS DEGRADADAS – PRAD
As características de clima, geologia, solo e geomorfologia da área, interferem de forma direta na execução do PRAD, tendo em vista que deve se levar em consideração cada uma dessas informações. A Instrução Normativa n° 4 de 2001 (IBAMA, 2011) instrui exigências mínimas para a elaboração de Programas de Recuperação de Áreas Degradadas – PRAD, e afirma que “o PRAD deverá propor medidas que assegurem a proteção das áreas degradadas ou alteradas de quaisquer fatores que possam dificultar ou impedir o processo de recuperação”.
O objetivo do PRAD é a garantia da segurança e da saúde pública, através da reabilitação das áreas degradadas pelas ações humanas, de modo a retorná-las às condições desejáveis e socialmente aceitáveis (LIMA; FLORES; COSTA, 2006).
Apesar de o PRAD ser voltado para aspectos como o solo e vegetação, acaba afetando positivamente o ar, água, a fauna e os seres humanos, possibilitando uma qualidade de vida melhor, além de proporcionar melhorias nos recursos naturais existentes. Segundo CORRÊA (2007), os Planos de Recuperação de Área Degrada (PRAD) executados em áreas de Cerrado têm sido orçados entre R$ 500,00 e R$ 15.000,00 por hectare revegetado.
O PRAD deverá reunir informações, diagnósticos, e estudos que permitam a avaliação da degradação ou alteração e a consequente definição de medidas adequadas à recuperação da área, em conformidade com as especificações da Legislação Federal (IBAMA, 2011).
Para tanto, é necessário definir a área a ser recuperada, para utilização de instrumentos e técnicas de levantamentos topográficos apropriados, pois a depender do equipamento a ser utilizado os resultados terão diferenças, devido ao próprio funcionamento e objetivo do instrumento, enquanto um, os Geodésicos e Topográficos armazenam suas observações de forma bruta, para posterior processamento obtendo maior precisão, os de Navegação não fazem registro, fazendo com que tenham poucos critérios para restringir os resultados. O presente artigo tem como objetivo distinguir a precisão entre os dois GPS aplicado em medições de custos em programas de recuperação de áreas degradadas, comparando a área de um levantamento realizado em uma propriedade no sudoeste baiano, com os dois equipamentos em questão.
METODOLOGIA
Foi realizado levantamento de campo, objetivando uma pesquisa a nível de conhecimento real. O levantamento dos dados foi procedido em uma fazenda situada no município de Barra do Choça, cidade baiana a 524 km da capital Salvador.
Inicialmente foi realizado os procedimentos comuns para a utilização de receptores GNSS Geodésicos, reconhecimento da propriedade e locação de piquetes nos vértices da propriedade, posicionamento da base em um local aberto que não faça sombra ou possua obstáculo que impeça a aquisição dos dados transmitidos pelos satélites, em seguida coletados os pontos de cada vértice da propriedade com o receptor, neste momento foi feito simultaneamente a coleta dos pontos com um receptor GPS de navegação. Realizado o trabalho de campo, os dados, tanto do receptor GNSS Geodésico como o de navegação, foram descarregados para um computador para realizar os processamentos e análises.
Para os dados provenientes do receptor GNSS Geodésico, é realizado uma serie de procedimentos para processamento dos dados. Para tanto, são utilizados alguns softwares. O processamento foi realizado de duas formas: Posicionamento por Ponto Preciso (PPP) e estático clássico, podendo ser utilizado qualquer uma das duas formas, para este trabalho em questão optou para os dados do processamento estático clássico realizado com o auxílio do software Topcon Tools, mesmo programa utilizado para realizar o ajustamento.
Neste software foram utilizadas as estações da RBMC de Teixeira de Freitas (BATF) e Montes Claros (MGMC), para o pós-processamento e ajustamento da estação BASE da propriedade. Uma vez obtidas as coordenadas da BASE, utilizou-se as mesmas, como referência para o pós-processamento das estações do perímetro do imóvel.
RESULTADOS E DISCUSSÕES
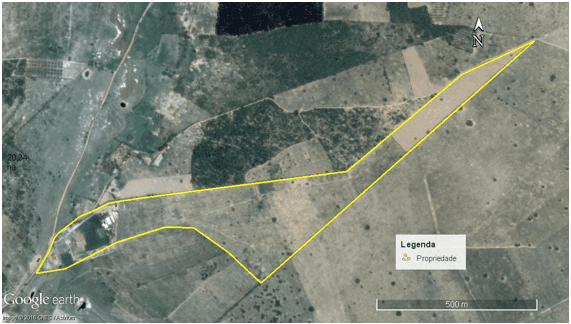
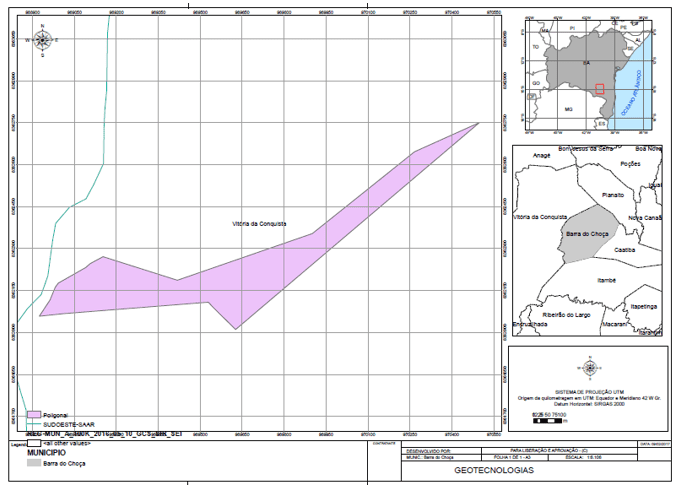
Realizado com sucesso o processamento e ajustamento, o arquivo foi exportado e com ajuda de outro software, ArcGis, foi elaborado o mapa e calculado a área da propriedade, conforme apresentado no ANEXO I – MAPA DA PROPRIEDADE. Para o processamento dos dados do receptor GPS de navegação foi utilizado o software TrackMaker Pro para importar os dados do aparelho e no próprio software foi calculado a área, moldado o mapa e em seguida transferido para o Google Earth PRO, para assim definir o mapa com imagem de satélite, conforme apresentado na Figura 1.
Com os dois levantamentos realizados com diferentes receptores, foi feita a comparação das coordenadas obtidas, precisões alcançadas e área resultante. Ao final são calculadas as distâncias de afastamento entre cada um dos pontos do perímetro da propriedade, por meio das coordenadas obtidas pelos receptores de Navegação e Geodésico.
Na primeira tabela é informada as coordenadas dos vértices da poligonal da propriedade obtidas pelo GPS de navegação com precisão informada pelo equipamento de em torno de 3 metros, enquanto na segunda tabela é informada as coordenadas obtidas pelo GPS Geodésico, com precisão de aproximadamente de 50 cm.
Tabela 1 – Coordenadas da propriedade obtidas com o GPS de Navegação com precisão informada de 3 metros.
| Vértices da Propriedade | x/y GPS Navegação (UTM) |
| P01 | 322948,661 |
| 8366144,559 | |
| P02 | 322853,868 |
| 8366082,387 | |
| P03 | 322844,171 |
| 8366068,706 | |
| P04 | 322826,408 |
| 8366024,317 | |
| P05 | 322788,980 |
| 8365960,199 | |
| P06 | 322878,882 |
| 8365974,578 | |
| P07 | 323279,727 |
| 8366105,531 | |
| P08 | 323390,754 |
| 8366028,335 | |
| P09 | 323411,137 |
| 8366008,900 | |
| P10 | 323491,563 |
| 8365935,021 | |
| P11 | 324341,543 |
| 8366693,835 | |
| P12 | 324114,601 |
| 8366587,624 | |
| P13 | 323756,888 |
| 8366283,616 | |
| P14 | 323013,147 |
| 8366179,375 | |
| P15 | 322966,593 |
| 8366155,798 |
Tabela 2 – Coordenadas da propriedade obtidas com o GPS Geodésico com precisão informa de 3 metros.
| Vértices da Propriedade | x/y GPS Geodésico (UTM) |
| P01 | 322951,082 |
| 8366142,075 | |
| P02 | 322854,719 |
| 8366083,721 | |
| P03 | 322844,386 |
| 8366068,708 | |
| P04 | 322827,487 |
| 8366023,993 | |
| P05 | 322790,138 |
| 8365963,859 | |
| P06 | 322878,229 |
| 8365975,569 | |
| P07 | 323279,403 |
| 8366105,639 | |
| P08 | 323391,496 |
| 8366030,001 | |
| P09 | 323411,989 |
| 8366010,234 | |
| P10 | 323491,669 |
| 8365935,243 | |
| P11 | 324341,628 |
| 8366696,934 | |
| P12 | 324113,099 |
| 8366586,839 | |
| P13 | 323756,341 |
| 8366284,829 | |
| P14 | 323011,833 |
| 8366182,353 | |
| P15 | 322966,804 |
| 8366156,463 |
As diferenças entres os receptores é significante, uma vez que, a funcionalidade de cada equipamento é distinta, afinal cada um tem sua maneira própria para obter o resultado final das coordenadas de campo, enquanto o de Navegação fornecem coordenadas em tempo real o Geodésico armazena os dados brutos para realização de processamento, obtendo precisões de metros e centímetros respectivamente.
Para realização do cálculo de distância entre os pontos, foram exportados os arquivos, em forma de tabela, na qual estava as coordenas em UTM para o ecxel, assim em seguida aplicada a fórmula de Pitágoras resultando as distâncias de diferenças entres os vértices, para melhor visualização os resultados estão apresentados no gráfico.
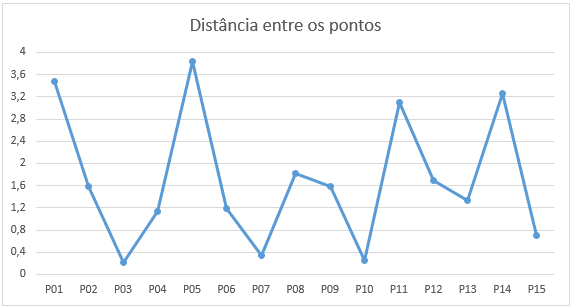
Observa-se maiores diferenças nos vértices P01, P05, P11 e P14 o que proporcionou maior influência nos resultados de áreas, visto que a área da propriedade com o levantamento realizado pelo GPS de navegação e calculado pelo TrackMaker Pro foi 21,0045 hectares, e realizado pelo GPS geodésico, processado e ajustado, foi de 19.0414 hectares, uma diferença de área de 10,31%.
CONSIDERAÇÕES FINAIS
Sendo assim, a diferença entre as áreas da mesma propriedade, levantadas por diferentes receptores GPS/GNSS, quando em atividades voltadas para medições de áreas a serem recuperadas, levando em consideração os valores gastos por hectares, se torna um fator decisivo para qual tipo de equipamento a ser utilizado.
A diferença de 1,96ha para cada 19ha medidas, considerando uma área a ser recuperada com apenas revegetação, plantio de mudas por exemplo, esse valor variando entre R$ 500,00/ha a R$ 15.000,00/ha, conforme menciona CORRÊA (2007), a diferença pode não ser exorbitante, no entanto quando se trata de uma área contaminada, ou com necessidade de implantação em conjunto com a revegetação de retentores de sedimento, soluções mais avançadas, na qual o valor por hectares pode superar os R$100.000,00/ha e em casos críticos chega aos R$400.000,00/ha, a diferença se torna extremamente elevada.
Para a execução de um PRAD em diferentes áreas, áreas para recuperação por revegetação e áreas contaminadas, tem os custos distintos, consequentemente o prejuízo na utilização em um receptor menos preciso também terá diferenças. Por exemplo, a cada 10 hectares de áreas a ser recuperada, quando realizada o levantamento pelo GPS de Navegação, 10, 31% seria de erro de área, considerando valores de R$ 15.000,00/ha para áreas não contaminadas e R$100.000,00/ha para áreas contaminadas, o prejuízo seria de R$ 15.465 e R$103100,00 respectivamente.
Portanto, com os resultados obtidos nesta pesquisa, a recomendação é que se use receptores geodésico, pois a área terá precisão de centímetros.
REFERÊNCIAS
CORRÊA, D.C.; MARINHO, D.P. e FERREIRA, L.F.. GPS como ferramenta para SIG. Rio de Janeiro, Instituto Militar de Engenahria, 6 p.
GRIPP, M.F.A.; Nonato, C.A. A preservação e recuperação do meio ambiente no planejamento e projeto de lavra. II Congresso Ítalo Brasileiro de Engenharia de Minas, 1993. São Paulo, 15 a 17/09/1993.
SILVA, I.; ERWES, H. Curso de atualização em topografia e GPS. São Carlos: Escola de Engenharia de São Carlos, USP, 1996. 108 p.
SILVA, SÉRGIO TEIXEIRA. Análise comparativa entre equipamentos eletrônicos (GPS) para levantamento de dados topográficos. Belo Horizonte, UFMG, 2002. 40 p.
ANEXO
[1] Engenheiro Ambiental, Pós Graduando em Geotecnologias: Solução de Inteligência Geográfica pela Escola de Engenharia de Agrimensura.
[2] Engenheiro, Doutor em Ciências Geodésicas pela Universidade Federal do Paraná.

