ARTIGO ORIGINAL
TANAN, Randal Miguel [1], GERALDI, Luciana Maura Aquaroni [2]
TANAN, Randal Miguel. GERALDI, Luciana Maura Aquaroni. Desenvolvimento de um protótipo com função de orientação e mobilidade: A acessibilidade de pessoas com deficiência visual no shopping. Revista Científica Multidisciplinar Núcleo do Conhecimento. Ano 05, Ed. 06, Vol. 09, pp. 148-168. Junho de 2020. ISSN: 2448-0959, Link de acesso: https://www.nucleodoconhecimento.com.br/engenharia-de-producao/orientacao-e-mobilidade
RESUMO
Com o tempo diferentes visões foram lançadas sobre as pessoas com deficiência visual, envolvendo superstições e estigmas. Atualmente busca-se compreender a deficiência a partir da abordagem social em que as barreiras ambientais são as grandes responsáveis pela exclusão dessas pessoas com a falta de acessibilidade. A Tecnologia Assistiva busca modificar esse cenário utilizando a Tecnologia a favor da independência das pessoas com deficiência visual. Dessa forma este estudo tem o objetivo criar um protótipo que simule uma TA pautado na necessidade de diminuir as barreiras que a pessoa com deficiência visual tem dentro de um shopping utilizando o Arduino. No processo de desenvolvimento do protótipo primeiramente teve-se o desenho do projeto, seguido pela montagem dos componentes, programação e testes. Os resultados apontaram para um sistema de movimentação e orientação eficientes, com precisão a uma velocidade 5 na programação do carrinho. O sistema de áudio também funcionou de forma eficiente com emissão de instruções claras e objetivas. Por fim, conclui-se que o estudo atingiu aos seus objetivos e construiu um protótipo preciso para as funções solicitadas que poderá auxiliar na orientação e mobilidade de pessoas com deficiência visual. Contudo, aponta-se também algumas possibilidades de melhoria para implementação futura.
Palavras-chave: Tecnologia Assistiva, Deficiência Visual, Arduino.
1. INTRODUÇÃO
Historicamente as pessoas com deficiência foram vistas de diferentes maneiras, permeadas por superstições e estigmas. A abordagem médica colaborou para ressaltar as limitações do indivíduo, o que predomina na nossa sociedade até os dias de hoje. Com tudo, um novo modelo possibilitou compreender que essas limitações estão no nosso ambiente: inacessível e excludente. O modelo social, mais abrangente, “compreende a deficiência como resultado das limitações e estruturas do corpo, mas também da influência de fatores sociais e ambientais do meio no qual está inserida”[3].
Pensando nas barreiras vivenciadas pelas pessoas com deficiência, mais especificamente as pessoas com deficiência visual, que esse estudo se estruturou. De acordo com a Lei Brasileira de Inclusão de 2015 em seu 2º artigo
considera-se pessoa com deficiência aquela que tem impedimento de longo prazo de natureza física, mental, intelectual ou sensorial, o qual, em interação com uma ou mais barreiras, pode obstruir sua participação plena e efetiva na sociedade em igualdade de condições com as demais[4].
No Brasil com os dados obtidos no Censo Demográfico realizado pelo IBGE em 2010, constou que 45,6 milhões de pessoas apresentavam algum tipo de deficiência. Desse total em torno de 35,7 milhões de pessoas apresentavam deficiência visual. Mesmo com uma quantidade que representava 23,9 % de pessoas com deficiência na população brasileira em 2010, a questão de acessibilidade é pouca explorada. A Lei Federal de n° 10.098/2000 organiza um conjunto de normas com o intuito de promover acessibilidade para pessoas com deficiência ou com pouca mobilidade em locais públicos. Mesmo com essas normas as pessoas com deficiência visual enfrentam uma série de barreiras no seu cotidiano, uma delas se não a principal é a sua locomoção nas ruas e em ambientes de grande movimentação que não estão devidamente preparados para recebe-los[5].
Em relação as pessoas com deficiência visual tem-se que as mesmas apresentam limitações ou perda das funções básicas do olho e do sistema visual. Há diferentes níveis de acuidade visual e campo de visão o que resulta em dois grupos. A baixa visão ou visão subnormal é caracterizada por indivíduos que mesmo tendo passado por tratamentos ou correções apresentam comprometimento da visão. A pessoa que apresenta uma visão subnormal não consegue contar com clareza os dedos da mão a uma distância de 3 metros, apresentando resíduos de visão[6].
Até pouco tempo atrás não levava-se em consideração os resíduos visuais, as pessoas eram tratadas como se fossem cegas e já os educavam em braile, ensinavam a se locomover com o auxílio de bengala e etc. Atualmente as pessoas que apresentam resíduos visuais passam por especialistas com a intenção de aproveitar esse potencial para suas atividades do dia a dia. Mesmo utilizando utensílios ópticos as pessoas que tem baixa visão conseguem apenas distinguir objetos, vultos e claridade a uma distância pequena[7].
A cegueira é a perda total da visão ou uma capacidade relativamente baixa de enxergar. Pode surgir no nascimento (cegueira congênita) ou no decorrer da vida (cegueira adquirida), por causas orgânicas ou acidentais. As pessoas que nascem com o sentido da visão e posteriormente o perdem conseguem armazenar memórias visuais, conseguindo se lembrar de cores, objetos e luzes que tenham visto antes da perca da visão, o que auxilia no seu processo de readaptação, assim como os resíduos visuais[8].
As principais causas da deficiência são:
Retinopatia da prematuridade: causada pela imaturidade da retina, em decorrência de parto prematuro ou de excesso de oxigênio na incubadora. Catarata congênita: em consequência de rubéola ou de outras infecções na gestão. Glaucoma congênito: que pode ser hereditário ou causado por infecções. Atrofia óptica[9].
A deficiência visual pode impactar a vida das pessoas de maneiras diferentes: dependendo da idade, da forma que foi adquirida, do posicionamento pessoal, da maneira que a família lida com a deficiência e do grau de deficiência, entre outros fatores. A perda da visão pode afetar o indivíduo de forma emocional, social, profissional, pessoal assim como suas atividades diárias do cotidiano, interferindo na sua autonomia e independência. “A visão é o canal mais importante de relacionamento do indivíduo com o mundo exterior”[10], sendo que, qualquer grau de perca atrelado as barreiras ambientas limita a capacidade de se orientar e movimentar com independência.
Alguns autores consideram a limitação na orientação e mobilidade o efeito e maior impacto que a cegueira pode causar. No período pré-escolar é quando a criança começa a se socializar, fazer amigos, brincar e se relacionar. Se ela não tiver os apoios necessários para desenvolver esses relacionamentos a sua capacidade de aprendizado será prejudicada. Os processos de educação para as crianças com deficiência visual precisam começar o mais rápido possível, pois desde cedo elas já vão aprendendo a desenvolver seus outros sentidos e receber o devido treinamento de orientação e mobilidade para se locomover com segurança.
A tecnologia vem corroborar com esse processo tanto para as crianças como para os adultos. Segundo Blanco e Silva citados por Alves[11] “o termo tecnologia vem do grego technê (arte, ofício) e logos (estudo de) e referia-se à fixação dos termos técnicos, designando os utensílios, as máquinas, suas partes e as operações dos ofícios”. Basicamente a tecnologia são estudos voltados para a solução de problemas.
Atualmente tem-se também a Tecnologia Assistiva – TA que é a aplicação da tecnologia visando auxiliar a pessoa com deficiência a desempenhar as atividades do seu cotidiano a fim de proporcionar independência buscando cada vez mais a sua inclusão e fazendo com que se sintas livres para se locomover, relacionar, estudar e trabalhar. Algumas categorias de TA são: auxílios para a vida diária, comunicação aumentativa e alternativa, acessibilidade ao computador, controle de ambiente, projetos arquitetônicos com acessibilidade, órteses e próteses, adequação postural, auxílios para mobilidade, auxílios para deficientes visuais, auxílios para melhorar a função auditiva, adaptações em veículos e esporte e lazer[12].
Pensando nesse cenário a criação de TA se torna uma forma de diminuir as barreiras enfrentadas cotidianamente pelas pessoas com deficiência. Atualmente com a utilização de algumas plataformas pode-se desenvolver protótipos que auxiliem na acessibilidade. Uma delas é o Arduino
uma plataforma de hardware open source, de fácil utilização, ideal para a criação de dispositivos que permitam interação com o ambiente, dispositivos estes que utilizem como entrada sensores de temperatura, luz, som e etc.., e como saída leds, motores, displays, auto-falantes etc., criando desta forma possibilidades ilimitadas[13].
Ele é composto por um microcomputador que apresenta apenas um circuito e utiliza linguagem C e C++[14]. É ideal para a construção de protótipos de estudos para o desenvolvimento de projetos. Pensando nas necessidades das pessoas com deficiência visual, este estudo utilizou a engenharia para a construção de um protótipo que simula uma possível TA para a locomoção dentro de um Shopping.
O trabalho teve como objetivo geral criar um protótipo que simule uma TA pautado na necessidade de diminuir as barreiras que a pessoa com deficiência visual tem dentro de um shopping. Para alcançá-lo teve-se como objetivos específicos: construir um dispositivo com base no Arduino e testar o funcionamento do protótipo em trajeto. Dessa forma, o item de desenvolvimento descreve o processo de criação, montagem, programação e teste do dispositivo, assim como os resultados encontrados seguido pela conclusão que aponta as considerações finais.
2. DESENVOLVIMENTO
Partindo do embasamento teórico explicitado anteriormente o desenvolvimento do protótipo ocorreu em quatro etapas, descritas a seguir e que podem ser divididas em: desenho do projeto, montagem dos componentes, programação e testes. Por fim, são apresentados os principais resultados.
2.1 DESENHO DO PROJETO
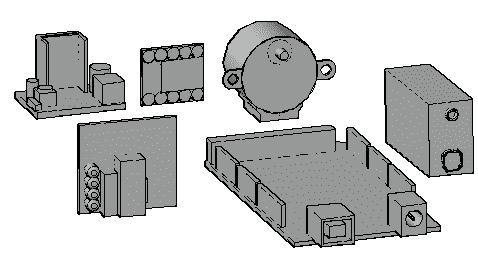
Primeiramente projetou-se com o software Autocad todos os componentes pertencentes ao protótipo, pois dessa forma seria mais fácil elaborar o corpo do carrinho, como mostra a Figura 1.
Figura 1 – Componentes do Projeto
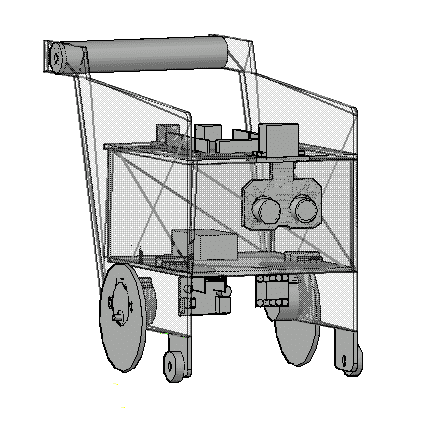
Em seguida elaborou-se o corpo do carrinho e as peças foram colocadas em seus devidos lugares de acordo com suas funções, como mostra a Figura 2.
Figura 2 – Protótipo Carrinho
2.2 MONTAGEM DOS COMPONENTES
A montagem dos componentes do protótipo se refere a dois sistemas específicos. Um deles é responsável pela movimentação e orientação e o outro, por sua vez, é responsável pela emissão, controle e regulagem de som. Nos tópicos a seguir serão descritas as especificações de cada um deles.
2.2.1 SISTEMA DE MOVIMENTAÇÃO E ORIENTAÇÃO
O sistema de Movimentação e Orientação é composto por dois Motores de Passo 28 BYJ-48 e seus respectivos Drivers ULN2003. Um motor de passo trata-se
de um componente eletromecânico, que converte pulsos em deslocamentos angulares precisos. A cada pulso, o eixo roda um pouco (passo) e permanece estável nessa posição nenhum pulso for enviado. Aplicando uma série de pulsos, pode-se obter o deslocamento angular desejado. Se a série de pulsos não terminar, o eixo vai rodando constantemente com uma velocidade proporcional à frequência dos pulsos[15].
O Passo é apenas um componente da rotação total do motor e sua precisão está relacionada ao número de passos por rotação que ele apresenta. Então pode-se dizer que quanto mais passos um motor tiver mais preciso ele será. Para controlar um motor de passo são necessários dispositivos que apresentem micro controladores e um driver que servirá para sua alimentação. Para o projeto escolheu-se o Motor de Passo 28BYJ-48 e o Driver UNL2003.
Esse motor é alimentado por 5V, constituído por 4 fases, possui frequência de 100 Hz e resistência DC de 50 Ohm. Nas suas especificações informa que com 64 passos ele gira uma volta completa (360 graus). Fazendo uma relação entre uma volta completa e a quantidade de passos, divide-se 360 graus por 64 passos resultando em 5,625 graus, ou seja, um passo do motor é igual a 5,625 graus. Ele apresenta uma taxa de redução de 1/64, então pode-se estabelecer que 5,625 graus / 64 é igual a aproximadamente 0,088 graus, isso quer dizer que com essa taxa de redução o ângulo de passo passa de 5,625 graus para 0,088 graus[16].
A conexão entre os Motores de Passo BYJ-48 e seus Drivers ULN2003 foi realizada por pinos. O motor de passo apresenta cinco pinos para fazer sua conexão com o Driver UNL2003. No projeto foram utilizados dois motores que foram conectados aos Drivers da mesma maneira. Para fazer a conexão foram utilizados quatro pinos que foram conectados nas respectivas portas 1, 2, 3 e 4 dos Drivers.
Os dois Drivers utilizaram portas diferentes para suas respectivas conexões com o Arduino: o do lado direito utilizou as portas digitais 34, 36, 38 e 40 para conectar-se as respectivas portas IN1, IN2, IN3 e IN4 do Driver, enquanto que o do lado esquerdo seguiu o mesmo esquema, mas utilizou as portas digitais 6, 7, 8 e 9[17].
2.2.2 SISTEMA DE EMISSÃO, CONTROLE E REGULAGEM DE SOM
O Sistema de Emissão, Controle e Regulagem de som é composto por: Módulo Mp3 DFPlayer Mini, Módulo Amplificador de Áudio Tda2030, Alto-Falante e Chave Fim de Curso, que serão descritos a seguir. O Módulo Mp3 DFPlayer Mini é um dispositivo que possibilita gerar sons, músicas e efeitos sonoros em um projeto. Permite a conexão de um alto-falante de até 3W, possibilita a execução de arquivos mp3, suporta cartões sd e é alimentado com tensões entre 3.2 e 5VDC[18].
Já, o Módulo Amplificador de Áudio Tda2030 é utilizado para amplificar áudios de classe AB. É alimentado por 14V, possui uma potência de saída de 14W e contém um dissipador de calor que é responsável por reduzir a temperatura do dispositivo[19].
O Alto-Falante é um dispositivo considerado transdutor pois tem a capacidade de converter um sinal elétrico em pressão sonora que resulta em ondas sonoras[20]. Para o protótipo foi utilizado um Alto-Falante de 3 w. Por fim, a Chave Fim de Curso é um mecanismo que por meio de um acionamento mecânico tem a capacidade de abrir ou fechar circuito. Para o protótipo utilizou-se duas Chaves de Fim de Curso[21]. Utilizou-se o software Fritizing para esquematizar as conexões que foram realizadas entre os componentes do Sistema de Emissão, Controle e Regulagem de Som, conforme mostra a Figura 3.
Figura 3 – Esquema das Conexões entre os Componentes do Protótipo
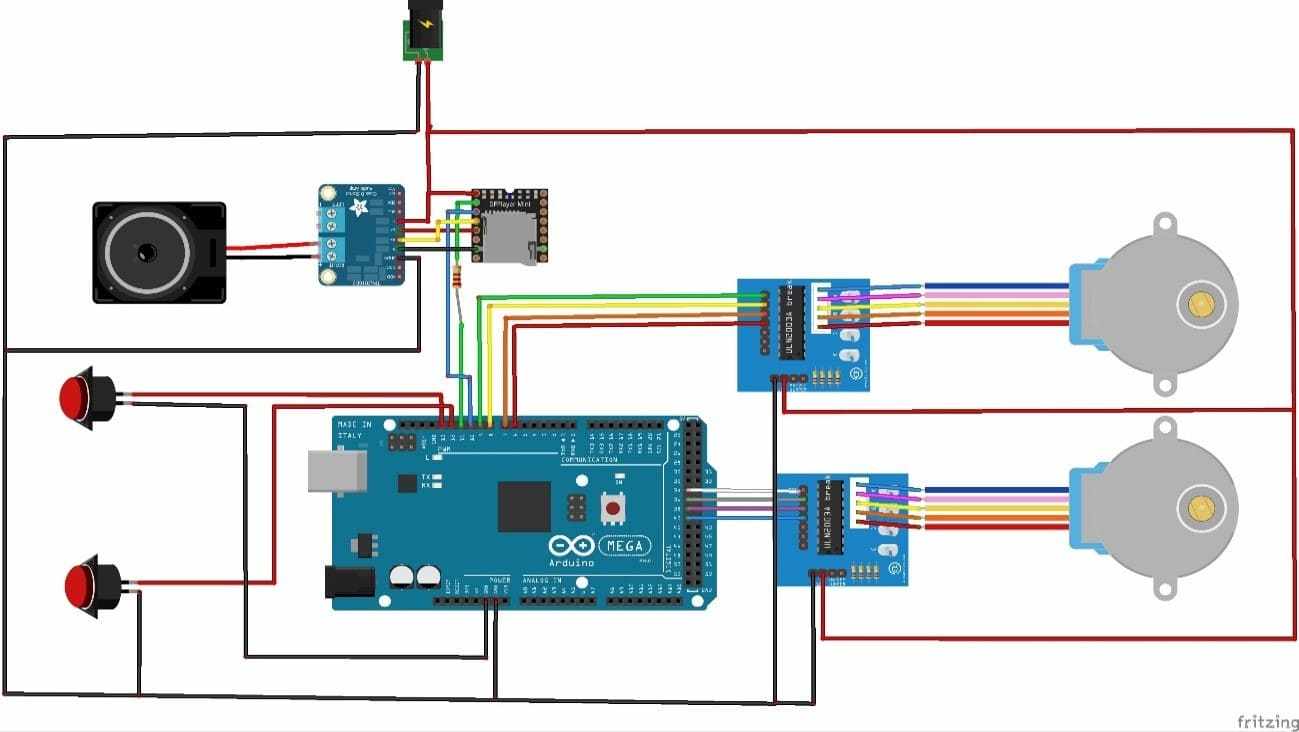
Dois pinos do Módulo Mp3 DFPlayer Mini foram conectados ao Módulo Amplificador de Áudio Tda2030 através de suas entradas de canal de sinal de áudio. O GND e o VCC do Módulo Mp3 conectaram-se ao Módulo Amplificador que tem, por sua vez, seu GND e VCC conectados ao carregador. O primeiro pino do Módulo Mp3 DFPlayer Mini foi ligado a uma fonte externa (um carregador de celular) que contém 3A de corrente e 5V. Portanto o pino será alimentado com 5V. O GND do módulo mp3 será ligado ao GND do módulo amplificador.
O segundo pino foi ligado na porta 11 do Arduino e funcionou como um meio de comunicação entre o Arduino e o módulo. É necessário ter um resistor de 330 ohms para fazer com que o funcionamento fique correto.
O terceiro pino foi conectado na porta 10 do Arduino que também funcionou como um meio de comunicação. O quarto pino foi conectado à porta IN do módulo amplificador para receber a entrada de som.
Os botões foram conectados da mesma maneira. Um dos pinos serve como meio de comunicação entre ele e o Arduino e o GND dos botões conectaram-se ao GND do Arduino. O GND e o VCC do Alto-Falante conectaram-se ao módulo amplificador para a emissão de som.
2.3 PROGRAMAÇÃO
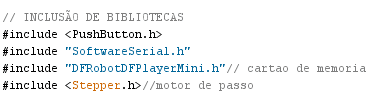
Para a programação do protótipo foram realizados os seguintes passos: inclusão das bibliotecas; variáveis dos pinos de comunicação entre o Módulo Mp3 DFPlayer Mini e o Arduino; variável para definir a intensidade de volume; variáveis dos pinos de comunicação entre os botões e o Arduino; variáveis para definir os pinos de comunicação entre os motores de passo e o Arduino; definição das legendas de cada loja; variáveis de inicialização do Módulo Mp3 DFPlayer Mini; variáveis correspondentes aos áudios do MENU; e variáveis correspondentes a movimentação.
No início do programa foram incluídas as bibliotecas necessárias para o seu funcionamento, como mostra a Figura 4.
Figura 4 – Bibliotecas para a Programação
Posteriormente, as variáveis da Figura 5 foram utilizadas para definição dos pinos de comunicação entre o Módulo Mp3 DFPlayer Mini e o Arduino.
Figura 5 – Comunicação entre o Mp3 e o Arduíno
A variável abaixo, exemplificada na Figura 6, foi utilizada para definir a intensidade do volume. A intensidade varia de 0 a 30. Definiu-se 30 pois com isso o volume fica no seu máximo e o usuário apenas o regula manualmente no próprio módulo de acordo com a sua vontade.
Figura 6 – Intensidade do Volume
As variáveis a seguir, da Figura 7, foram utilizadas para definir os pinos de comunicação entre os botões e o Arduino. O Botão Menu utilizou o pino 12 e essa variável permite que o usuário escolha a loja que deseja ir. O Botão Ok utilizou o pino 13 e ela permite que o usuário confirme a loja de destino para o carrinho iniciar o trajeto.
Figura 7 – Comunicação entre os Botões e o Arduíno
As variáveis exemplificadas na Figura 8 foram utilizadas para definição dos pinos de comunicação entre os motores de passo e o Arduino. O motor 1 corresponde ao motor da esquerda, o primeiro valor (2050) refere-se a quantidade de passos que o motor tem que andar para dar uma volta completa no eixo e os valores 6, 8, 7 e 9 correspondem aos pinos das portas que estão conectadas as bobinas. O motor 2 corresponde ao motor da direita e ele segue o mesmo padrão do outro motor, o primeiro valor corresponde a quantidade de passos necessários para ele girar uma volta completa e os valores 40, 36, 38 e 34 correspondem aos pinos das portas que estão conectadas as bobinas.
Figura 8 – Comunicação entre os Motores de Passos e o Arduíno

A seguir, como mostra a Figura 9, foram definidas as legendas das lojas utilizadas no teste do protótipo.
Figura 9 – Legendas
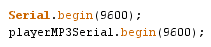
As variáveis a seguir, Figura 10, são responsáveis por iniciar a porta serial do Módulo Mp3 DFPlayer Mini que é responsável pelos sons que são emitidos ao ligar o dispositivo. A porta serial é iniciada a 9600 bps.
Figura 10 – Sons de início
As variáveis abaixo, representadas pelo conjunto de Figuras 11, estabelecem a ordem dos áudios que são emitidos ao ligar o dispositivo. O valor “2” que aparece em todas elas se refere ao nome da pasta em que os áudios foram armazenados. Os demais valores que estão na sequência do valor “2” são referentes ao nome de cada áudio que foi salvo na pasta. A frase que está escrita na frente de cada variável é para exemplificar a frase que é emitida em cada áudio. Os áudios tem um deley de 5000 milissegundos entre eles.
Figura 11 – Áudios
![]()
![]()
![]()

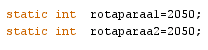
Nessa etapa, o loop significa que essas variáveis vão se repetir ao longo de todo o programa. Utilizou-se as variáveis com a palavra “static” para guardar os valores sempre que a função for chamada. Também definiu-se a quantidade de passos necessários de um ponto de origem até o seu destino e o trajeto inverso do ponto de destino até o de origem. A variável “rotaparaa1” refere-se à quantidade de passos que o motor 1 precisa andar para chegar na loja A e a variável “rottaparaa2” refere-se à quantidade de passos que o motor 2 precisa andar para chegar na loja A, como mostra a Figura 12.
Figura 12 – Movimentação
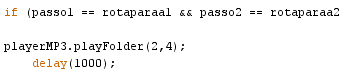
No trecho da programação abaixo, Figura 13, a condição estabelece que se o meu destino for igual a “1” que corresponde a loja A e o meu ponto de origem for igual “0” que corresponde ao ponto de saída, o módulo buscará o áudio número 1 da pasta “2”. Essa variável é ativada quando o usuário deseja ir à loja A e a seleciona no botão de MENU.
Figura 13 – Orientação Sonora

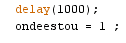
Após o deley de 1000 milissegundos o programa já assume que o seu destino é igual a “1”, ou seja, que ele precisa ir até a loja A, como mostra a Figura 14.
Figura 14 – Delay
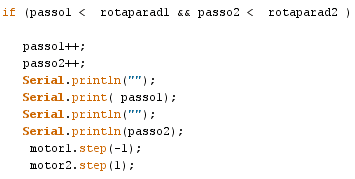
Quando isso acontece surge uma nova condição e estabelece que se “passo1” e “passo2” forem menores que “rotaparaa1” e “rotapara2” automaticamente soma-se 1 ao “step”, este que é o comando responsável pelo giro do motor. Essa somatória é representada pelo “++” na programação. Ou seja nessa condição é estabelecido que se a quantidade de passos dos motores 1 e 2 forem menores que a quantidade de passos necessários para ambos chegarem na loja A, soma-se 1 na quantidade de passos que eles precisam andar. Esse 1 corresponde ao número de passos necessários para o motor andar do ponto de saída para chegar na loja A, como mostra a Figura 15.
Figura 15 – Step
Quando a variável assume que ambos os motores são iguais a 1 ele inicia o seu trajeto do ponto de saída até a loja A que corresponde a 2054 passos do motor. Por último tem-se uma última variável, como mostra a Figura 16, que quando se chega ao ponto de destino automaticamente o Módulo Mp3 DFPlayer Mini busca o áudio referente a chegada a loja A “Chegamos a loja A”.
Figura 16 – Áudio da Chegada
2.4 TESTES
Como última etapa do processo de construção e desenvolvimento do protótipo têm-se os testes. Ao ligar o carrinho a uma fonte de alimentação ele automaticamente aciona o seu sistema de áudio e fornece instruções e a opção de escolha do destino. O botão da direita é o Menu e ele fornece ao usuário a opção de escolha do destino desejado. A cada clique nesse botão ele passa para o próximo destino cadastrado. O botão da esquerda é botão de Confirmação, quando o usuário escolhe o seu destino ele precisa pressionar esse botão para o carrinho entender aonde ele precisa ir.
Para o teste, um trajeto foi elaborado com a definição de quatro pontos: A, B, C e E. Esses pontos representam as possíveis lojas que o usuário pode ir. Outro ponto foi definido como S que representa o ponto de saída para cada um dos trajetos. Posteriormente foram posicionados em uma cartolina de forma estratégica afim de verificar a precisão do carrinho em diferente distâncias e angulações de trajeto. A Figura 17 a seguir mostra o esquema do trajeto.
Figura 17 – Esquema do Trajeto de teste do Carrinho
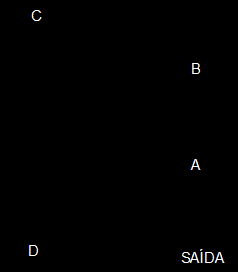
Para explicar o funcionamento do carrinho é necessário definir o Motor de Passo da esquerda como Motor de Passo 1 e o Motor de Passo da direita como Motor de Passo 2. Assim, com o início dos testes de movimento do ponto S até o A, o Motor de Passo 1 e 2 são acionados e o carrinho anda 2050 passos em linha reta. Do ponto ao ponto A até o S apenas o Motor de Passo 2 se movimenta realizando uma rotação 180° e depois anda 2050 passos para chegar no ponto de saída.
Do ponto de S até o B, o carrinho segue a mesma base de trajeto do ponto A, o que difere é a quantidade de passos que nesse trajeto é de 4100. Do ponto S até o C, o carrinho inicialmente gira 45° para a esquerda e anda 10250 passos em linha reta. Para fazer o retorno de C para S ele rotacional 45° para a direita e anda 10250. Do ponto S até o D, o carrinho faz um giro de 90° para a esquerda e anda 6150 passos em linha reta. Para voltar de D para S ele rotacional 90° para a direita e anda 6150.
2.5 RESULTADOS
Para concluir o desenvolvimento do protótipo tem-se que o Sistema de Movimentação e Orientação se mostrou eficiente. O carrinho conseguiu ir a todos os destinos com precisão. Mesmo quando teve a necessidade na mudança na angulação no meio do trajeto essa precisão se manteve. A programação do Motor de Passo permite estabelecer um parâmetro de velocidade que varia de 0 a 7. Observou-se que a velocidade ideal para um bom funcionamento mantendo a precisão do carrinho é de 5.
O sistema de Áudio também funcionou de forma eficiente, a voz de orientação passa as instruções de forma clara e objetiva. O tempo de deley de 5000 milissegundos entre os áudios permite que o usuário compreenda todas as instruções e tenha um bom tempo de resposta. O programa funcionou perfeitamente. As condições e variáveis estabelecidas possibilitaram um bom funcionamento entre o Sistema de Movimentação e Orientação e o Sistema de Emissão, Controle e Regulagem de Som.
3. CONCLUSÃO
Pensando em diminuir as barreiras que as pessoas com deficiência visual ainda têm dentro de shopping, o trabalho teve como objetivo a criação de um protótipo que simule uma TA. Esse protótipo, com formato de um carrinho, teve como principal foco orientar as pessoas com deficiência visual e lhes proporcionar um sentimento de independência, permitindo chegar aos destinos desejados, que estão cadastrados no sistema, de forma independente. O protótipo utilizou o Arduino como elemento principal e outros componentes como Módulo Mp3 DFPlayer Mini, Módulo Amplificador de Áudio Tda2030, Motor de Passo e 28 BYJ-48 e seus respectivos Drivers ULN2003, Chave Fim de Curso e Alto-Falante.
A ideia inicial do projeto era utilizar um Módulo GPS para orientar as pessoas durante o trajeto. Mas esse sistema iria fornecer muitas informações em tempo real que poderiam causar algum tipo de confusão ao usuário. Então substituiu-se esse Módulo pelo Motor de Passo que calcula a distância entre dois pontos através da quantidade de passos. Esse Módulo atendeu de forma mais satisfatória aos objetivos traçados, pois de acordo com os resultados ele apresentou uma precisão muito grande e permitiu observar uma tranquilidade em relação a rota, uma vez que o destino escolhido já estava pré-estabelecido.
Como um protótipo pode-se afirmar que ele atingiu aos objetivos do estudo desenvolvido orientando com precisão o movimento em um trajeto. Mas para torná-lo viável para implantação e utilização por pessoas com deficiência visual algumas melhorias seriam necessárias, dentre essas pode-se citar: a implantação de um Módulo Sensor Ultrassônico para evitar possíveis colisões do carrinho com objetos ou pessoas; adaptação de fones de ouvidos para que o usuário se sinta mais confortável ao utilizar o carrinho e instalação de um Módulo GPS para servir de correção de trajeto se por algum motivo o carrinho sair da rota pré-estabelecida.
REFERÊNCIAS
ALMEIDA, M. B. Noções Básicas Sobre Metodologia de Pesquisa Científica. DTGI‐ECI/UFMG. s/d. 2p. Disponível em: <http://mba.eci.ufmg.br/downloads/metodologia.pdf>. Acesso em: nov./2019.
ALPHA. Chave Fim de Curso. Equipamentos Elétricos Ltda. s/d. Disponível em: <https://www.helenge.com.br/uploads/96d380bb19587fbce159b3dbfb099e8c.pdf>. Acesso em: abr./2020.
ALVES, T. A. S. Tecnologias de Informação e Comunicação (TIC) Nas Escolas: Da idealização à realidade: Estudos de casos múltiplos avaliativos realizado em escolas públicas do ensino médio do interior paraibano brasileiro. Universidade Lusófona de Humanidades e Tecnologias. Instituto de Ciências da Educação. Dissertação: Lisboa, 2009. 134p.
ANDRADE, D. Alto-Falantes! O que são e suas particularidades. Auto Motivo. 2014. Disponível em: <https://www.revistaautomotivo.com.br/alto-falantes-o-que-sao-e-suas-particularidades/>. Acesso em: abr./2020.
ARDUINO E CIA. Como Usar o Módulo Mp3 DFPlayer Mini. 2017. Disponível em: <https://www.arduinoecia.com.br/modulo-mp3-dfplayer-mini-dfrobot-arduino/>. Acesso em: abr./2020.
BENATTO, R. C. Analisador de Objetos com Plotagem 3D. Trabalho de Conclusão de Curso. Universidade Positivo. Curitiba, 2009. 51p. Disponível em: <https://www.up.edu.br/blogs/engenharia-da-computacao/wp-content/uploads/sites/6/2015/06/2009.21.pdf>. Acesso em: abr./2020.
BERSCH, R. Introdução à Tecnologia Assistiva. Tecnologia e Educação. Porto Alegre, 2017. 20p. Disponível em: < http://www.assistiva.com.br/Introducao_Tecnologia_Assistiva.pdf>. Acesso em: nov./2019.
BRASIL. Lei Brasileira de Inclusão nº 13.146, de 6 de julho de 2015. Disponível em: <http://www.planalto.gov.br/ccivil_03/_ato2015-2018/2015/lei/l13146.htm>. Acesso em: nov./2019.
_______. Lei de Acessibilidade nº 10.098, de 19 de dezembro de 2000. Disponível em: < http://www.planalto.gov.br/ccivil_03/leis/l10098.htm>. Acesso em: nov./2019.
GIL, M.(org). Deficiência Visual. Brasília: MEC. Secretaria de Educação a Distância, 2000. 80 p. (Cadernos da TV Escola. 1. ISSN 1518-4692). Disponível em: <http://portal.mec.gov.br/seed/arquivos/pdf/deficienciavisual.pdf>. Acesso em: nov./2019.
GOMES, P. C. T. Entenda o que é Arduíno e Como Funciona sua Aplicação! Inovação e Tecnologia. OP Services. 2015. Disponível em: <https://www.opservices.com.br/o-que-e-o-arduino/>. Acesso em: Jun. 2020.
LOSCHI, M. Pessoas com Deficiência: adaptando espaços e atitudes. Agência IBGE Notícias. 2019. Disponível em: <https://agenciadenoticias.ibge.gov.br/agencia-noticias/2012-agencia-de-noticias/noticias/16794-pessoas-com-deficiencia-adaptando-espacos-e-atitudes>. Acesso em: nov./2019.
MÓDULO ELETRÔNICA. Controlando um Motor de Passo com o Arduino. 2019. Disponível em: <https://www.moduloeletronica.com.br/blog?single=Controlando-um-Motor-de-Passo-com-o-Arduino>. Acesso em: abr./2020.
MPPR. Ministério Público do Paraná. Conceitos de Deficiência. Disponível em: <http://www.pcd.mppr.mp.br/pagina-41.html>. Acesso em: nov./2019.
NOVA ELETRÔNICA. Circuito Amplificador de Áudio de 14 Watts-TDA2030. s/d. Disponível em: <http://blog.novaeletronica.com.br/circuito-amplificador-de-audio-de-14-watts-tda2030/>. Acesso em: abr./2020.
SARTORETTO, M. L.: BERSCH, R. Assistiva: Tecnologia e Educação. Disponível em: < http://www.assistiva.com.br/tassistiva.html>. Acesso em: nov./2019.
SOUZA, A. R.; PAIXÃO, A. C.; UZÊDA, D. D.; DIAS, M. A.; DUARTE, S.; AMORIM, H. S. A Placa Arduíno: uma opção de baixo custo para experiências de física assistidas pelo PC. Revista Brasileira de Ensino de Física, v. 33, n. 1, 1702, 2011. 5p. Disponível em: < http://sbfisica.org.br/rbef/pdf/331702.pdf>. Acesso em: nov./2019.
APÊNDICE – REFERÊNCIAS DE NOTA DE RODAPÉ
3. (MPPR, 2019, p.1)
4. (BRASIL, 2015, p.1)
5. (LOSCHI, 2019)
6. (GIL, 2000)
7. (GIL, 2000)
8. (GIL, 2000)
9. (GIL, 2000, p.9)
10. (GIL, 2000, p.7)
11. (BLANCO; SILVA, 1993 apud ALVES, 2009, p.18)
12. (BERSCH, 2017) (SARTORETTO; BERSCH, 2019)
13. (SOUZA; PAIXÃO; UZÊDA et al, 2011, p.2)
14. (GOMES,2015)
15. (CONSTANDINOU, 2002 apud COSTA, 2009, p.18)
16. (BENATTO, 2009)
17. (MÓDULO ELETRÔNICA, 2019)
18. (ARDUINO E CIA, 2017)
19. (NOVA ELETRÔNICA, s/d)
20. (ANDRADE, 2014)
21. (ALPHA, s/d)
[1] Graduando em Engenharia de Produção.
[2] Orientadora. Doutorado em Educação Escolar. Mestrado em Engenharia (Engenharia de Produção). Especialização em Informática aplic. Edu Matemática. Especialização em Didática a Prática Escolar nos Diferentes Níveis. Graduação em Tecnologia Em Processamento de Dados.
Enviado: Junho, 2020.
Aprovado: Junho, 2020.


Uma resposta
Parabéns por pelo desenvolvimento, desse artigo e estudos