ARTIGO DE REVISÃO
LOPES, Carlos Roberto Hollanda [1], PIRES, Gentil Oliveira [2]
LOPES, Carlos Roberto Hollanda. PIRES, Gentil Oliveira. Dispositivos inerciais: projeto e desenvolvimento aplicado à solução de problemas de engenharia. Revista Científica Multidisciplinar Núcleo do Conhecimento. Ano. 07, Ed. 04, Vol. 05, pp. 131-156. Abril de 2022. ISSN: 2448-0959, Link de acesso: https://www.nucleodoconhecimento.com.br/engenharia-mecanica/projeto-e-desenvolvimento
RESUMO
O presente trabalho aborda a captação de informações como: aceleração gravitacional e velocidade angular por intermédio de um sensor inercial MPU6050, com seis graus-de-liberdade, três para o acelerômetro e três para o giroscópio. O sensor inercial consegue captar os valores dos três giroscópios no entorno dos três eixos. Estes valores captados passam por um aprimoramento pelo filtro de Kalman e filtro Complementar para, desta maneira, transmitir com confiabilidade a medição inercial. Diante disto, o direcionamento principal desse trabalho é a otimização da pilotagem, a segurança do piloto de motocicleta e principalmente prevenção de acidentes por falta do uso de setas indicadoras de direção. Com isso, pretende-se responder ao questionamento: os dispositivos inerciais podem ser considerados uma inovação no uso de motocicletas? O objetivo é embarcar um dispositivo inercial inovador em uma motocicleta, usufruindo-se das tecnologias presentes nos sensores inerciais MEMS (Micro-Electro-Mechanical Systems). O dispositivo mencionado nesse trabalho explica a criação de um dispositivo inercial que, mediante a elaboração de um código e a interação com o protótipo, pode acionar as setas de uma motocicleta. Com os valores corretos, o hardware Arduino pode determinar os ângulos necessários para o acionamento das setas indicadoras de direção através de uma sequência de códigos fonte. Quando há uma angulação (deflexão) no sensor, os ângulos mudam e, ao cruzarem os intervalos pré-estabelecidos no código fonte, podem acionar e desarmar as setas, tornando-as automática e independente da ação do piloto. Tanto o acelerômetro quanto o giroscópio estudado neste trabalho são do tipo MEMS capacitivo. Por fim, concluiu-se que dispositivo foi satisfatório e atendeu o objetivo proposto, que é o acionamento automático das setas, podendo ser considerado uma inovação no uso de motocicletas.
Palavras-chave: Dispositivos Inerciais, Acelerômetro, Giroscópio, Filtro de Kalman, Acionamento Automático.
1. INTRODUÇÃO
A estrutura Micro-Electro-Mechanical Systems, também conhecida como MEMS é um sistema eletromecânica formada por três partes principais: o atuador ou sensor que é a interface analógica para a aquisição, a parte de controle digital e processamento numérico e a transmissão e amplificação do sinal vindo do atuador, isso tudo em escala micrométrica (FORHAN, 2010).
Nos últimos 10 anos o Sistema de Navegação Inercial vem sendo utilizado desde os simuladores militares até vídeo games. Mas não foi aí que surgiu esse sistema, essa tecnologia vem sendo usada há bastante tempo. Mas as aplicabilidades dos sensores inerciais MEMS estão cada vez mais presentes nos eletrônicos utilizados no cotidiano (TAKAHASHI, 2009).
Amparado por uma placa de silício que juntamente com elementos mecânicos os sensores MEMS chegam a níveis escalas microscópicas de comprimento.
Nas motocicletas quando se aplica o giroscópio e o acelerômetro que fazem parte do sistema Inercial, são usadas as aferições das taxas de variações angulares e as acelerações, isso com o intuito de gerar uma rotina computacional a partir da alimentação com dados um código fonte e a partir daí executar uma ação (TITTERTON; WESTON, 1997).
As leis de Newton são a base teórica para que os sensores de movimento forneçam os sinais, podendo então computar a atitude e a posição do veículo, a trajetória e com isso implementar todas as correções pertinentes (FORHAN; SENNA, 2010).
A eficiência e o baixo custo dos sensores inerciais na plataforma Arduino têm sido cada vez mais usados em ambiente acadêmico, em especial nos cursos de engenharia.
No presente artigo será apresentado o referencial teórico a seguir todo o material usado para a construção do dispositivo, seguido da metodologia e, por fim, serão discutidos os resultados dos testes realizados.
Pensando na segurança no trânsito, foi realizada a criação de um dispositivo inercial que possui a habilidade de automatizar as motocicletas e, com isso, torná-las aptas a acionar automaticamente as setas, independente da ação do homem. Com esse intuito utilizou-se de sensores inerciais como o giroscópio e o acelerômetro.
O direcionamento principal desse trabalho é a otimização da pilotagem, a segurança do piloto de motocicleta e, principalmente, a prevenção de acidentes por falta do uso de setas indicadoras de direção. Com isso, pretende-se responder o questionamento: os dispositivos inerciais podem ser considerados uma inovação no uso de motocicletas? O objetivo é embarcar um dispositivo inercial inovador em uma motocicleta, usufruindo-se das tecnologias presentes nos sensores inerciais MEMS (Micro-Electro-Mechanical Systems).
2. EMBASAMENTO TEÓRICO
2.1. ACELERÔMETRO
Os acelerômetros podem ser definidos como dispositivos que medem as vibrações ou as acelerações estática/dinâmica do movimento de uma estrutura. Podem ser usados para medir inclinação, forças inércias (velocidade, deslocamento ou força) e choque ou vibração. São utilizados em diversas áreas como a elétrica, tecnológica, civil, mecânica e industrial, sendo instrumentos essenciais para o bom funcionamento dos sistemas que compõe essas áreas (PEREIRA, 2018).
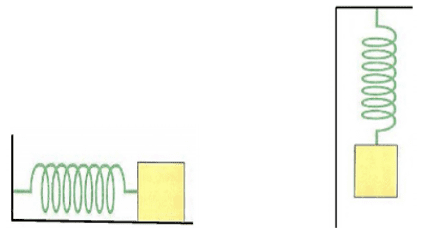
Pode-se definir como um equipamento eletromecânico usado para medir acelerações nos três eixos dimensionais. O acelerômetro mede as acelerações atuantes em um corpo. A figura 1 abaixo exemplifica isso. Na figura da esquerda, há um bloco ligado a um anteparo fixo através de uma mola. O conjunto está na horizontal e, não havendo nenhuma força externa atuando sobre ele capaz de modificar seu estado mecânico, pode-se considerar então que o sistema está em repouso, inerte, tendo como base a Primeira Lei de Newton. Já na figura da direita o conjunto está na vertical e o bloco sofre ação de uma força provocando uma deformação na mola. Essa força é proporcional à aceleração gravitacional g. Portanto, é a força que a aceleração gravitacional exerce sobre o bloco. Essa aceleração independe da massa dos corpos do sistema. Um acelerômetro, na superfície da Terra, medirá uma aceleração g de intensidade aproximada de 9,81 m/s². Em equilíbrio, o sistema ficará em repouso, pois a força elástica de Hooke, contrária ao movimento, equilibrará matematicamente a força gravitacional.
Figura 1 – Demonstração da aceleração gravitacional
Os acelerômetros têm amplas aplicações, desde a rotação de telas de smartphones, até o acionamento de airbags, sendo muito usado nos sistemas de navegação inercial (INS) e no auxílio ao GPS (WALDMANN, 2002).
Nos anos 90, os materiais utilizados para a medição da aceleração são os piezoelétricos, eletromagnéticos, capacitivos e ópticos. Os sensores piezo-elétricos eram os mais comuns para detecção do movimento de aceleração, e algumas das principais qualidades desses tipos de sensores era: a tolerância à temperatura; a amplitude na frequência de funcionamento; a simplicidade no circuito de leitura; e entre outras (AMIN et. al. 2014). O funcionamento do cristal piezo-elétrico é semelhante ao funcionamento de um capacitor, no qual se torna mais permissível a passagem de energia ou menos permissível, à medida que é comprimido ou alongado pela massa suspensa no sensor.
Os acelerômetros entraram na era digital, sendo uma mudança significativa na tecnologia dos acelerômetros a utilização do silício para a sua fabricação. Muitos acelerômetros atuais fazem uso deste material em suas construções devido a sua composição e características físicas, é o caso dos acelerômetros piezo resistentes, acelerômetros de capacitância variável e os sistemas MEMS (MILLIGAN; HOMEIJER, 2012).
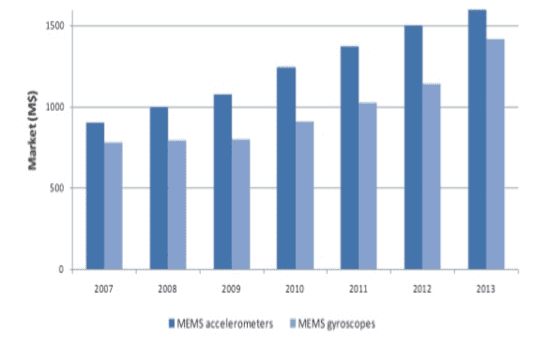
O desenvolvimento da aplicabilidade dos sensores inerciais MEMS pode ser ilustrado na figura 1 abaixo.
Figura 2 – Evolução dos Sensores
O sensor usado neste trabalho foi do tipo MPU6050 é um sensor eletromecânico do tipo MEMS, micro eletromechanical system.
2.2 GIROSCÓPIO
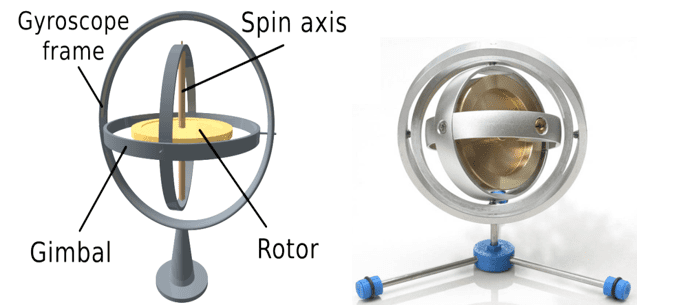
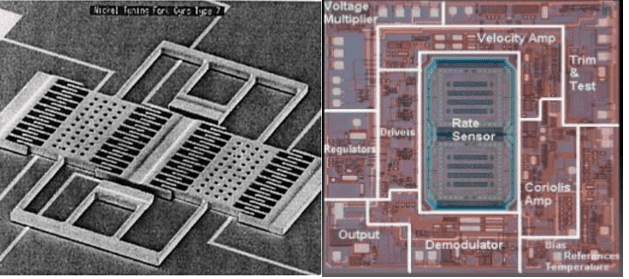
Um giroscópio consiste essencialmente em um rotor perfeitamente balanceado que pode girar livremente em torno de seus eixos geométricos perpendiculares entre si que se interceptam no seu centro de gravidade. Quando colocado numa suspensão tipo Cardan, um giroscópio pode adquirir qualquer orientação, mas seu centro de massa deve permanecer fixo no espaço. A agulha giroscópica desenvolvida no início do século passado é exemplo de uma das primeiras aplicações formais do giroscópio e suas propriedades. Foi desenvolvida na busca de um equipamento que indicasse o Norte Verdadeiro em vez do Norte Magnético – superando o problema das agulhas magnéticas (MINGUENS, 1996).
O giroscópio, no sensor inercial, é responsável por medir as velocidades angulares no entorno dos eixos coordenados. Em um sensor inercial, o giroscópio utiliza a referência da direção da força gravitacional para medir as taxas de variações angulares de um corpo (SPITZER, 2000). Em outras palavras, um giroscópio pode medir quão rápido um objeto pode girar em relação a um sistema referencial inercial. Um bom exemplo é a utilização desse recurso na função piloto automático de aviões.
Para um sistema de navegação inercial é imprescindível determinar a sua posição e a sua velocidade. Estes sensores, através de suas tecnologias, puderam transmitir estas informações através da matemática. Uma vez que a aceleração é medida, calcula-se a integral dela e com isso é possível achar a velocidade. Ao se integrar a velocidade acha-se a sua posição, portanto é desta maneira que um sistema de navegação inercial funciona.
A primeira propriedade do Giroscópio é a inércia, ou seja, a variação se opõe a direção dos eixos de rotação. Com isso, quando os discos de rotação ficam constantes, os suspensores de Cardan se movimentam. Sendo esta propriedade a embasamento da bússola giroscópica e de vários outros aparelhos de navegação. A precessão caracteriza a segunda propriedade, ou seja, no momento que o giroscópio entra em rotação altera também a direção do seu eixo, o giroscópio se movimenta ate o momento em que o eixo localiza perpendicular ao seu eixo principal de rotação e ao eixo em volta do qual se deu a rotação. Sendo essa uma característica de se manter a conservação do momento angular (PORTO, 2021).
A figura da esquerda ilustra um esquema dos componentes de um giroscópio, enquanto a da direita um giroscópio propriamente pronto vendido comercialmente.
Figura 3 – Giroscópio
Fisicamente, o giroscópio mecânico conserva as mesmas direções dos seus eixos de rotação, via conservação dos momentos angulares e, opondo-se, por assim dizer, a qualquer alteração desses momentos angulares, preservando seus eixos de rotação inalterados. A Lei da Giroscopia afirma que a velocidade angular não varia quando há um torque aplicado perpendicularmente em um eixo, mas pode assim alterar sua direção. Quando uma força externa é aplicada ao giroscópio, ele tende a fazer correções para manter as direções dos eixos de rotações originais, estabilizando as referências rotacionais. Um exemplo desse fenômeno é o giroscópio de precessão, que muda o eixo de rotação quando há um torque aplicado em outro eixo diferente. Um bom exemplo é o experimento da roda da bicicleta, muito comum nos experimentos das aulas de física.
2.3 FILTRO DE KALMAN E FILTRO COMPLEMENTAR
De forma simplificada, o método conhecido como Filtro de Kalman pode ser caracterizado como um conjunto de equações matemáticas com a finalidade de estimar parâmetros mais precisos, uma vez que sua aplicação visa reduzir erros em sistemas deturpados por Ruído Gaussiano Branco (ABREU, 2008).
O filtro de Kalman é um filtro estimulador recursivo ótimo. Esse recurso é muito aplicado para estimativa de estados mecânicos e parâmetros em um sistema onde apresente alguma incerteza de valor. A cada momento o filtro captura os dados e estima a incerteza associada. O filtro de Kalman é usado em sistemas lineares. O filtro de Kalman trabalha em duas etapas, a previsão e a correção e, por este motivo, pode ser chamado de filtro preditivo uma vez que o seu algoritmo, cíclico, faz a previsão de um estado e de um erro e por consequência faz a sua correção.
O filtro de Kalman foca em mapear as propriedades físicas dos objetos de estudo e dos sensores, em parâmetros matemáticos descrevendo as incertezas do problema como um todo. Tomando como exemplo o rastreamento de alvos, o estado possui informações referentes à velocidade e posição do alvo e eventualmente pode ter informações adicionais, como velocidade angular. O estado também possui informações de observações (radares de vigilância) que costumam ser bastante ruidosas. Assim, é necessário o filtro de Kalman para a estimativa recursiva do estado do alvo, para se obter, por fim, o comportamento do movimento realizado por ele (FRENCL, 2010).
A predição, também conhecida como estimativa a priori, estima o estado atual apenas com dados estimados até o passo anterior, não incluindo dados observados no tempo atual. Na sequência, o estado atual é incrementado com a atualização, na qual a estimativa a priori é corrigida com a observação do tempo atual, resultando em uma estimativa combinada, conhecida como estimativa a posteriori (AIUBE, 2005).
Esse tipo de filtro é muito utilizado em aplicações como o rastreamento da posição, velocidade e aceleração de aviões, drones e até veículos autônomos (LEFFERTS; MARKLEY; SHUSTER, 1982).
Dentre as aplicações, uma das formas mais usadas é na localização de veículos e sistemas móveis. Tem sido vital nos sistemas de navegação e guiamento de submarinos, mísseis de cruzeiro, ônibus espaciais (com destaque para o Projeto Apollo da NASA) e para a Estação Espacial Internacional (GAYLOR; DAVID; LIGHTSEY, 2003).
O filtro Complementar trabalha de maneira bem próxima, porém se faz do recurso de estabelecer pesos ou proporções para cada fonte de obtenção dos dados, como o acelerômetro e o giroscópio.
O Filtro complementar é na verdade uma combinação de dois filtros diferentes: um filtro passa alta para o giroscópio e um filtro passa-baixa para o acelerômetro. O primeiro, passa apenas valores acima de certo limite, ao contrário do filtro passa baixo, o que permite que apenas os valores abaixo (MONTEIRO, 2006).
A figura 4 abaixo apresenta três curvas. A curva verde (superior) demonstra a leitura do acelerômetro, a curva azul (inferior) mostra o comportamento do giroscópio, podendo assim perceber que ele tende a escorregar enquanto o acelerômetro tenta manter-se constante, apesar dos ruídos. A curva vermelha (do meio) representa o filtro complementar fundindo as duas curvas. Nessa curva não há o ruído do acelerômetro e, tão pouco, o escorregamento do giroscópio.
Figura 4 – Gráfico do sensor inercial
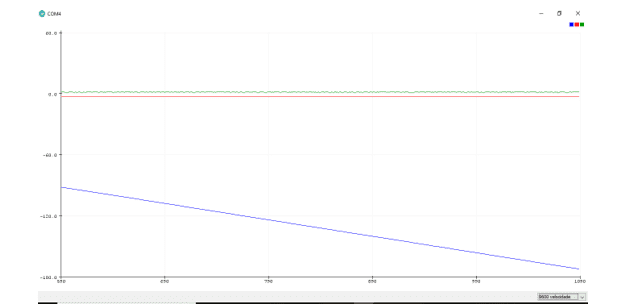
O giroscópio, apesar de muito preciso, apresenta um escorregamento na obtenção do valor, já o acelerômetro, por sua vez, apresenta uma boa precisão direcional, mas gera muito ruído nas medidas, por meio de pequenos pulsos de tensão no dispositivo eletromecânico.
Logo, para resolver essa questão fez-se necessário a implementação do filtro de Kalman ou Complementar fundindo os valores medidos dos dois sensores para tornar os resultados mais confiáveis possíveis para o acionamento das setas.
Os valores tratados para o acionamento das setas são ângulos pequenos e, portanto, quanto mais confiável for o valor obtido melhor será a confiabilidade do protótipo. A proporção utilizada no filtro complementar foi achada através dos diversos testes realizados no protótipo. É um método completamente empírico.
O filtro citado acima atua em duas ou mais funções de transferência onde se completam mutuamente e age também no domínio da frequência. Em um sistema que possui duas entradas de dados, uma delas proverá informação com ruído de alta frequência, a filtração é feita através de um filtro passa-baixas e outra entrada proverá informação com ruído de baixa frequência sendo filtrada por um filtro de passa-altas. Se estes filtros são matematicamente complementares, então o sinal filtrado será a reconstrução completa da variável sendo monitorada, eliminando os ruídos. Este método de tratamento de dados torna os sinais capturados mais próximos da realidade (BUENO; ROMANO, 2011).
2.4 ARDUINO
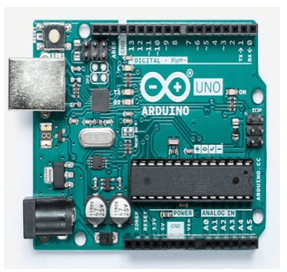
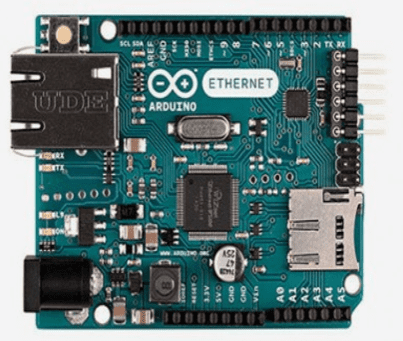
Arduino são placas eletrônicas controladoras, com CPU, que possuem código aberto, chamado de open source, permitindo assim ler dados de entrada, através de um conjunto de sequências (código) e transformar em saídas (ações). Qualquer componente pode ser utilizado através da manipulação de seu código fonte. O modelo Arduino escolhido foi do tipo UNO.
O Arduino é uma plataforma de prototipagem de código aberto baseado em hardware e software de fácil utilização (ARDUINO, 2018). Os Arduinos são placas com entradas e saídas analógicas e digitais, interface USB para comunicação com um microcomputador, e de fácil implementação de códigos com uma linguagem própria, muito parecida com a linguagem C. Os Arduinos utilizam os microcontroladores ATMEGA, e as placas já possuem todos os componentes necessários para o seu funcionamento, como resistores, capacitores, cristal e circuito regulador de tensão para alimentação (GARCIA, 2005).
Figura 5 – Placa Arduino UNO
O ambiente para manipular o código é chamado de IDE (ambiente de desenvolvimento integrado), que é o software Arduino. Nele é possível alterar ou criar códigos utilizando a linguagem de programação C/C++.
Segundo Martins (2005) existem vários tipos de microcontroladores. O que os diferencia são:
- Velocidade do processamento;
- Quantidade de memória interna disponível para armazenar dados;
- Quantidade de pinos de entrada e saída;
- Fonte de alimentação;
- Tipos e as quantidades de periféricos;
- Arquitetura do circuito;
- Conjunto de instruções disponibilizado nos circuitos internos.
O Arduino trabalha em paralelo com o sensor inercial MPU6050. O sensor envia suas informações para o hardware Arduino que, através do código estabelecido no IDE, vai executar os comandos e preparar uma saída. No estudo em questão, irá resultar no acionamento automático das setas.
3. METODOLOGIA
Este capítulo destina-se à explicação de como foi criado o código e a interação com o protótipo e, por consequência, o acionamento das setas.
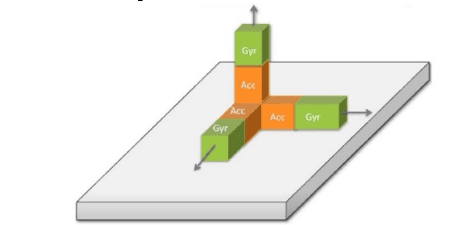
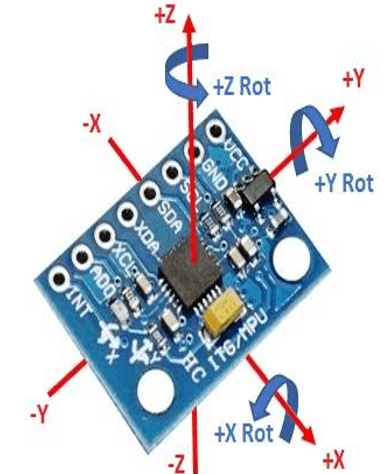
Como já mencionado, o sensor possui seis graus-de-liberdade, três para o acelerômetro e três para o giroscópio. A figura 14 mostra os três eixos e constitui uma Unidade de Medida Inercial (UMI).
Figura 6 – Unidade de medida inercial
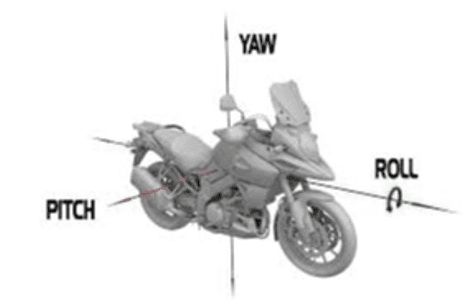
Os eixos X, Y e Z são chamados, respectivamente, por Roll, Pitch e Yaw. No trabalho proposto, apenas será abordado o eixo X, uma vez que o movimento para o acionamento das setas se dá exclusivamente neste eixo. A partir daqui os outros dois eixos não serão usados, apesar de constarem no código fonte.
Figura 7 – Os três eixos dimensionais
O sensor inercial MPU6050 informa valores que não correspondem a valores físicos. Para obter seus dados angulares em graus, é necessário utilizar algumas funções e integrações. O sensor inercial possui um programa digital de movimento (DPM) que consegue detectar as angulações (deflexões) geradas na placa por componentes capacitivos e gerar sinais elétricos. Esses sinais são convertidos para radianos e posteriormente para grau. O fluxograma, a seguir, demonstra como é feita a medição dos valores pelo sensor inercial.
Figura 8 – Fluxograma de medição

Para achar os valores do sensor inercial, primeiro encontrou-se o valor bruto de Roll no acelerômetro (AcX), em seguida, através da função (2), de linguagem de programação, converteu-se de radianos para graus.
![]() (1)
(1)
Roll = (atan2(AcX, sqrt(pow(AcY,2) + pow(AcZ,2)))*RAD_TO_DEG) (2)
Já para o giroscópio foi necessário utilizar a função (4), de linguagem de programação, para converter o valor bruto (GyX) para grau por segundo.
 (3)
(3)
Double GyXrate = GyX / 131.0 (4)
Nesta etapa, pegou-se o valor da leitura do giroscópio e multiplicou-se pelo intervalo temporal (6).
 (5)
(5)
GyXang += GyXrate * dt (6)
De posse dos valores físicos, tanto do acelerômetro quanto do giroscópio, implementou-se o filtro de Kalman e Complementar para suavizar e tornar a medição mais confiável possível. Nos testes realizados, foi implementado uma proporção de 95% para o valor do acelerômetro e 5% para o giroscópio. Esses valores foram obtidos através de vários testes realizados e percebeu-se que essa proporção gera um acionamento mais preciso e confiável.
 (7)
(7)
![]() (8)
(8)
Nesse momento, o que resta é apenas operar os valores de acordo com objetivo proposto no trabalho. A posição ortogonal com o solo marca 0º e conta-se 180º para cada lado, sendo valores positivos para direita e negativos para esquerda.
Foi estabelecido um intervalo de não acionamento para a posição vertical, ou seja, entre -7º e 7º o sensor está na vertical e não há necessidade de acionar as setas. Foi colocado um LED vermelho para este intervalo, apenas como referência para o piloto verificar se esse valor é o melhor ângulo para o acionamento.
Entre -7º e -60º o sensor inercial entende que há uma angulação (deflexão) para a esquerda, e, portanto, aciona um LED verde. Quando a motocicleta retorna para o intervalo vertical o sensor inercial desarma o acionamento independente da ação mecânica do piloto.
Para o acionamento das setas para o lado direito, se vale da mesma explicação, porém, para ângulos entre 7° e 60° e um LED amarelo acenderá.
Usou-se cores diferentes nas setas para melhorar a visualização do acionamento durante os testes no trânsito na cidade. No capítulo 6, em Resultados Obtidos, é explicado como foi o resultado em relação ao acionamento das setas.
O protocolo I2C (circuit integration) consiste, basicamente, na interação da interface do sensor inercial MPU6050 com o Arduino Uno. Ele faz as trocas de informações, geradas pelo sensor inercial, em comandos para o hardware Arduino através das diversas regras, normas, padrões e modelos.
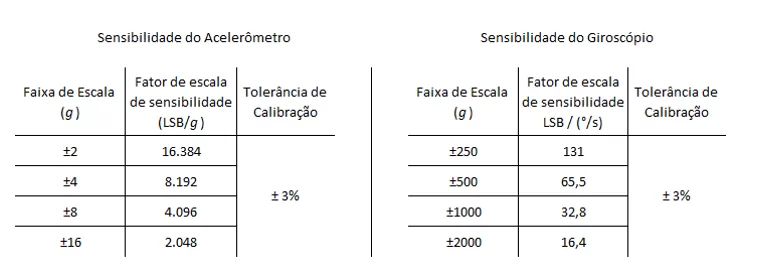
De acordo com o Datasheet do sensor inercial, as tabelas a seguir informam os níveis de sensibilidade do acelerômetro e giroscópio. Esses valores foram levados em consideração na criação do código fonte.
O sensor inercial é capaz de captar os valores dos três acelerômetros nos três eixos. Quando há uma angulação (deflexão) em qualquer eixo, há um deslocamento da massa de prova, que é proporcional à aceleração, e os sensores capacitivos, que fazem parte do sensor inercial MEMS, detectam esse deslocamento.
Tabela 1 – Sensibilidade do sensor inercial MPU6050
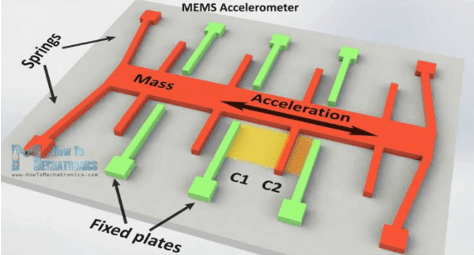
A figura 17 demonstra um esquema do funcionamento de um acelerômetro. A parte vermelha corresponde à massa de prova e as hastes verdes são os sensores capacitivos. Na variação do deslocamento, os sensores capacitivos detectam as variações nos valores de capacitância e retornam valores brutos de aceleração. Em uma superfície plana, o acelerômetro irá medir 0g.
Figura 9 – Acelerômetro
O sensor inercial consegue captar os valores dos três giroscópios no entorno dos três eixos. Tanto o acelerômetro quanto o giroscópio estudado neste trabalho são do tipo MEMS capacitivo. O último é conhecido, também, como giroscópio do tipo diapasão, que possuí uma massa de prova sensível a uma angulação (deflexão). Quando ocorre uma perturbação no sistema, ocorre um deslocamento da massa de prova que oscila entre os sensores capacitivos, na figura 18 representado pelas letras “A” e “B”. As variações no valor da capacitância retornam valores brutos de velocidade angular.
Figura 10 – Giroscópio capacitivo (comb-drive)
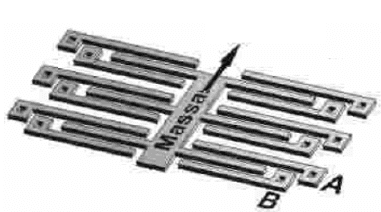
Figura 11 – Estrutura microscópica
O dispositivo inercial é um produto inovador não tendo nenhum sistema que contenha todos os objetivos do trabalho proposto. Foi realizada uma busca por patentes que se assemelham com o tema e foram encontradas apenas algumas, que representam partes deste trabalho, entretanto, não completamente.
O dispositivo está em processo de análise, uma vez que esse processo é complexo e burocrático.
4. RESULTADOS OBTIDOS
Sendo peças de baixo custo, com alta capacidade de customização e de praticidade no manuseamento, para a realização do protótipo optamos por utilizar componentes eletrônicos ligados e disponíveis pela plataforma Arduino.
Para a realização do projeto construiu-se dois protótipos, que seriam utilizados para a instalação em uma motocicleta real e para a instalação em uma motocicleta em escala demonstrativa, respectivamente.
Foi utilizado um sensor Inercial MPU6050, que dispõe de seis graus de liberdade, que são divididos igualmente entre o giroscópio e o acelerômetro. Como é descrito na figura 12 o sensor Inercial coleta dados periodicamente da aceleração nos eixos X, Y e Z, e também das velocidades angulares ao redor desse eixo. Possui também um sensor que mede a temperatura, que não foi utilizado no trabalho aqui apresentado, mas está no código fonte.
Figura 12 – Sensor MPU6050
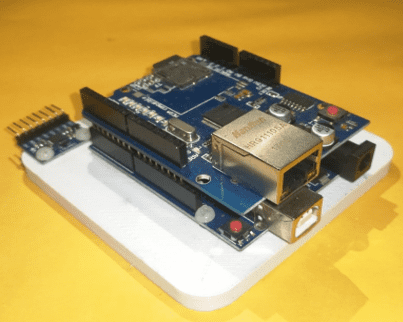
Os dados coletados no decorrer do presente trabalho foram armazenados em uma pasta, através de um bloco de notas no cartão de memória Shield Ethernet. Shields são peças Arduino que podem ser unidas a outras peças Arduino. E como mencionado a peça escolhida foi a Shield Ethernet, que pode ser instalado um cartão de memória, um micro SD.
Figura 13 – Shield Ethernet
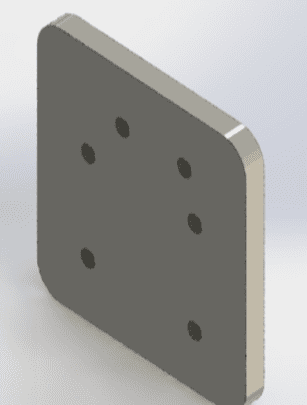
Para a fabricação da base – material ABS – que está o Arduino foi utilizado uma impressora 3D e as peças para fixação – parafusos e porcas de nylon – que foram adquiridos na internet.
Figura 14 – Base do protótipo
A seguir nas figuras 15, 16 e 17 são mostradas fotos do projeto completo.
Figura 15 – Montagem do protótipo
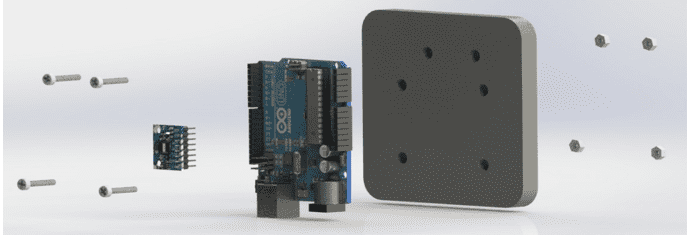
Figura 16 – Montagem do protótipo no guidão
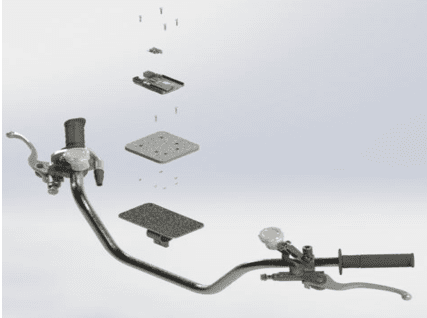
Figura 17 – Protótipo real
O suporte utilizado foi da marca Ram Mounts, pois os suportes testados para fixar o protótipo foram o que melhor contribuíram para o desenvolvimento do que foi proposto. Sendo de estrutura pequena e compacta, o suporte pode diminuir as vibrações presentes na sua estrutura.
Figura 18 – Suporte de guidão

O dispositivo criado pode ser usado em qualquer modelo de motocicleta, é necessário apenas fazer ajustes de acordo com o desenho da mesma. A motocicleta escolhida para poder fazer os testes foi a de modelo MT-03 do ano de 2019 e de fabricação Yamaha.
Figura 19 – Motocicleta MT-03

Para não ter discrepância nos testes realizados foram usados vários fatores externos para poder comprovar a eficiência do dispositivo, e mesmo assim os valores se mantiveram bem próximos.
As vibrações exercidas pelas motocicletas durante a pilotagem, mesmo com um suporte eficiente, acabaram fazendo o dispositivo trepidar um pouco. Com isso, alguns fios do dispositivo se soltaram, e precisou reconectar os fios e iniciar novamente os testes. A melhor solução para os eventos negativos foi a solda dos fios para melhor fixação. Consequentemente, foi possível reiniciar os testes e, uma vez com os testes concluídos, pode-se notar que o objetivo do trabalho foi alcançado. O que se pode perceber a respeito do dispositivo é que para melhor efetivo, seria necessário um base fechado, onde os componentes ficariam fixos e teria menos interferência das vibrações e do vento.
Em determinadas ocasiões as setas foram ativadas sem funcionalidade, esses eventos aconteciam em curvas acentuadas, locais de muitas curvas e em desvios de buracos. Mas com o desligamento mecânico através do botão de setas pelo piloto foi prontamente resolvido. O ponto positivo do dispositivo é que ele não anula o acionamento mecânico, pois os dois sistemas podem desempenhar seus papéis em paralelo na motocicleta.
Do ponto de vista com a legislação brasileira de trânsito (CTB, 1997) o acionamento das setas não tem uma distância mínima estipulada. Então surge a dúvida: Quando será o acionamento automático das setas?
Para responder essa pergunta, utiliza-se da Lei da Superposição de Forças, segunda lei de Newton “A mudança de movimento é proporcional à força motora imprimida e é produzida na direção de linha reta na qual aquela força é aplicada” (HALLIDAY; RESNICK, 2012). Ao entrar com a motocicleta em uma curva, automaticamente, o piloto já começa a inclinar a motocicleta, isso muitas vezes até involuntário. Com isso o sensor Inercial percebe a inclinação e acionam de uma distância segura e considerável as setas.
5. CONCLUSÃO
Com o trabalho apresentado foi possível perceber, no primeiro momento, que as vibrações geradas no decorrer dos testes fizeram com que os componentes de emendas tivessem que estar bem fixados, pois acabou afrouxando. Como solução foi fixado por solda eletrônica.
Uma melhoria que pode ser implementada no dispositivo seria a separação física do Arduino com o sensor inercial. O objetivo seria deixar apenas o sensor inercial fixado ao guidão da motocicleta uma vez que seu tamanho é bem pequeno e sofreria menos ações das vibrações e do vento. É necessário, também, um invólucro para armazenamento e fixação do sensor inercial. Normalmente, há espaço no guidão para instalação do sensor. O Arduino poderia ficar em outro local da motocicleta como, por exemplo, embaixo do banco, que normalmente apresenta algum espaço para armazenamento de objetos.
O orçamento usado para a criação do protótipo ficou bem abaixo do esperado, uma vez que os componentes são de baixo custo e boa parte deles puderam ser importados da China com preços muito inferiores aos do Brasil.
Foi feita uma busca bastante criteriosa para possíveis patentes com os mesmos assuntos e foram encontradas quatro patentes que se relacionam, a nível médio, com o trabalho proposto. Entretanto, nenhum dos quatro apresenta todos os métodos deste, como aplicação do filtro de Kalman, o código fonte totalmente original, componentes, acelerômetro, giroscópio, acionamento e desacionamento automático independente da ação do piloto. Dessa maneira, o dispositivo inercial pode ser enquadrado no critério de requisito inovador. Contudo, a possível patente pode sofrer questionamento por ter a possibilidade de ser dedutível de uma fusão de ideias e tecnologias das outras quatro patentes achadas anteriormente. O que não é verdadeiro. Todavia, a conclusão foi que a possibilidade de uma patente é desfavorável uma vez que possa parecer que foi uma união de ideias. Vale ressaltar que este trabalho foi desenvolvido, completamente, independente de ideias externas surgindo de conversas informais. Não houve, em nenhum momento, transcrição de qualquer outro trabalho com o mesmo tema em questão.
O dispositivo depois de pronto foi submetido a diversos testes. No primeiro momento foram feitos testes na motocicleta em escala reduzida e no modelo real com o sensor descalibrado. Os dados foram salvos. Na segunda etapa o dispositivo foi calibrado no IPQM, com o auxílio do professor e funcionário Pedro Roquette. Os dados, também, foram salvos. Percebeu-se que a diferença entre os valores calibrados e não calibrados eram muito próximos variando entre 1º e 1, 5º. Os desvios nos valores não são suficientes para atrapalhar na obtenção dos ângulos e no acionamento das setas. O sensor MPU6050 apresenta bastante confiabilidade e acuracidade, para esse fim, nos seus valores podendo, assim, ser trabalhado sem a devida calibração.
O direcionamento principal desse trabalho é a otimização da pilotagem, a segurança do piloto de motocicleta e, principalmente, a prevenção de acidentes por falta do uso de setas indicadoras de direção. Com isso, procurou-se responder: os dispositivos inerciais podem ser considerados uma inovação no uso de motocicletas? Sendo possível concluir que o dispositivo inercial conseguiu obter os valores corretamente e perceber as inclinações durante o teste no trânsito, permitindo dessa forma uma pilotagem mais segura, com isso pode chegar à conclusão de que os dispositivos inerciais podem ser considerados uma inovação no uso de motocicletas, assegurando assim um dispositivo que garanta uma condução segura.
O objetivo é embarcar um dispositivo inercial inovador em uma motocicleta usufruindo-se das tecnologias presentes nos sensores inerciais MEMS (Micro-Electro-Mechanical Systems). O dispositivo atendeu o objetivo do trabalho proposto, que é o acionamento automático das setas, e foi satisfatório. O projeto apresentou bastante dificuldade no primeiro momento por carência de conhecimentos e com o passar do tempo e dos testes foi-se aprimorando cada vez mais. Ainda há o que melhorar no dispositivo, mas entendendo que são pequenos arranjos, pois a ideia principal foi atendida. Basta adaptar a instalação para cada motocicleta. O dispositivo encontra-se embarcado na motocicleta do autor e está em perfeito funcionamento.
REFERÊNCIAS
ARDUINO. What is Arduino. Arduino, 2018. Disponível em: https://www.arduino.cc/en/Guide/Introduction. Acesso em 17/10/2021.
ABREU, L. B. de. Estudo da Utilização de Filtros de Kalman para Auto Localização. Tese (Doutorado) — UNIVERSIDADE DO PORTO, 2008.
AIUBE, F. Modelagem dos preços futuros de commodities: abordagem pelo filtro de partículas. SBA: Controle & Automação Sociedade Brasileira de Automatica, SciELO Brasil, v. 17, n. 4, p. 493–513, 2005.
AMIN, S. et al. Preference and Placement of Vehicle Crash Sensors. Tehnički Vjesnik – Tehnical Gazette, Osijek, Sveučilište Josipa Jurija Strossmayera u Osijeku. Disponível em: https://repositorio.ifsc.edu.br/bitstream/handle/123456789/1077/TCC%20BMG%20FINAL.pdf?sequence=1&isAllowed=y. Acesso em: 15/10/2021.
BUENO, A. G.; ROMANO, R. A. Filtro complementar aplicado a medida de inclinação de plataformas móveis. In: SEMINÁRIO MAUÁ DE INICIAÇÃO CIENTÍFICA, 3., 2011, São Paulo. Anais. São Paulo: Mauá, 2011.
CTB – Código de Trânsito Brasileiro: Lei n° 9.503, de 23 de setembro de 1997.
FRENCL, V. B. Técnicas de filtragem utilizando processos com saltos markovianos aplicados ao rastreamento de alvos móveis. 2010. Dissertação (Mestrado em Engenharia Elétrica e Eletrônica) – Universidade Estadual de Campinas, 2010.
FORHAN, N. A. E. Giroscópio MEMS. Inst. Nacional de Pes. Espaciais – INPE. São José dos Campos – SP, 2010. Disponível em: https://www.researchgate.net/profile/Neisy-Forhan/publication/41146375_Giroscopios_MEMS/links/58371a4208aef00f3bf80f86/Giroscopios-MEMS.pdf. Acesso em: 12/10/2021.
FORHAN, N. A. E.; SENNA, J. R. S. Giroscopios MESs. Relatorio técnico-científico, Instituto Nacional de Pesquisas Espaciais-INPE. Sao José dos Campos-SP-Brasil, iNPE-16671- RPQ/848, 2010.
GARCIA, C. Modelagem e simulação de processos industriais e de sistemas eletromecânicos. Editora da Universidade de São Paulo, 2005.
GAYLOR, D. E.; LIGHTSEY, E. G. GPS/INS Kalman filter design for spacecraft operating in the proximity of the international space station. AIAA Guidance. Navigation and Control Conference and Exhibit. 2003.
HALLIDAY, D.; RESNICK, R. Fundamentos de Física. Volume 1. Rio de Janeiro: LTC, 2012.
LEFFERTS, E. J.; MARKLEY, F. L.; SHUSTER, M. D. Kalman filtering for spacecraft attitude estimation. Journal of Guidance, Control, and Dynamics, v. 5, n. 5, p. 417–429, 1982.
MARTINS, N. A. Sistemas Microcontrolados: Uma Abordagem com o Microcontrolador PIC16F84. São Paulo: Novatec, 2005. Disponível em: https://www3.livrariacultura.com.br/imagem/capitulo/3173664.pdf. Acesso em: março de 2016.
MINGUENS, A. P. Navegação: A Ciência e a Arte. v. 1 – Navegação Costeira, estimada e em Águas Restritas. Rio de Janeiro: DHN, Brasil, 1996. 538 p.
MILLIGAN, D. J.; HOMEIJER, B. D; WALMSLEY, R. An ultra-low noise MEMS accelerometer for seismic imaging. 2011. DOI: 10.1109/ICSENS.2011.6127185
MONTEIRO, L. H. A. Sistemas dinâmicos. 2. Ed. São Paulo: Livraria da Física, 2006.
PEREIRA, M. Acelerômetros. Jaraguá do Sul: Anuário da Produção Acadêmica Docente.Faculdade Anhanguera de Jaraguá do Sul, 2018.
PORTO Editora. Giroscópio. Porto: Porto Editora, 2021. Disponível em: https://www.infopedia.pt/$giroscopio. Acesso em: 16/10/2021.
SPITZER, C. R. The avionics handbook. Williamsburg, Virginia. CRC Press, 2000.
TAKAHASHI, S. N. Acelerômetros e giroscópios: princípios, aplicações e componentes. Universidade Estadual de Londrina, 2009.
__________. Auto calibração de acelerômetros e magnetômetros. Universidade Estadual de Londrina, 2010.
TITTERTON, D.; WESTON, J. Strapdown Inertial Navigation Technology. Eastbourn: Peter Peregrinus Ltd, 1997.
WALDMANN. J. Fundamentos de sistemas de navegação inercial. ITA, 2002.
[1] Pós-Graduação em Gerenciamento de Projetos.
[2] Orientador. Possui graduação em Física, Mestrado em Física, Doutorado em Física (DSc) pela Universidade Federal do Rio de Janeiro – UFRJ e Pós-Doutorado em Física pelo Centro Brasileiro de Pesquisas Físicas – CBPF.
Enviado: Dezembro, 2021.
Aprovado: Abril, 2022.